Randy Mackay
Randy Mackay
This is the Copter-4.2.3-rc1 release which is very similar to the Plane-4.2.3 release but has these addition PRs added. - https://github.com/ArduPilot/ardupilot/pull/21248 - https://github.com/ArduPilot/ardupilot/pull/21230 - https://github.com/ArduPilot/ardupilot/pull/21388 The full list of PRs...
This is the Rover-4.2.3-rc1 release which is identical to the [Copter-4.2.3-rc1 release](https://github.com/ArduPilot/ardupilot/pull/21403).
This updates all backends to send the [GIMBAL_DEVICE_ATTITUDE_STATUS](https://github.com/ArduPilot/mavlink/blob/master/message_definitions/v1.0/common.xml#L5637) message instead of the older ardupilot specific [MOUNT_STATUS](https://github.com/ArduPilot/mavlink/blob/master/message_definitions/v1.0/ardupilotmega.xml#L1218) message. Some other changes are also included: - autotests adjusted to consume the GIMBAL_DEVICE_ATTITUDE_STATUS...

We should add (optional) support for the pilot to adjust the vehicle's height using the throttle stick while the vehicle is in Auto mode. In other vehicle's this is called...
This is an updated version of PR https://github.com/ArduPilot/ardupilot/pull/20513 This PR adds support for multiple proximity sensor backends by doing the following: - Backend specific parameters have been moved to a...
AP_Notify is meant only to provide notification of the vehicle state to the user so it should be theoretically possible to remove the AP_Notify library and have the vehicle operate...
For future releases of Copter, Tracker, Plane, Rover the severities of text messages sent from the flight controller will change to be consistent with the MAVLink standards. Before After SEVERITY_LOW...
We've got a few reports of MAVFTP failing to downloading of parameters and/or upload/download lua scripts in this issue: https://github.com/ArduPilot/ardupilot/issues/21246
 4.4 and 4.5 have many new [camera](https://ardupilot.org/dev/docs/mavlink-camera.html) and [gimbal controls](https://ardupilot.org/dev/docs/mavlink-gimbal-mount.html) available via mavlink but the controls displayed to users are still very clumsy ([user camera controls](https://ardupilot.org/copter/docs/common-camera-controls.html), [user gimbal controls](https://ardupilot.org/copter/docs/common-mount-targeting.html))....
Similar to https://github.com/ArduPilot/MissionPlanner/issues/2871 the Plan screen resets the ATTITUDE_TIME message's "ClimbRate" field to zero after it is written and then read back from the autopilot. 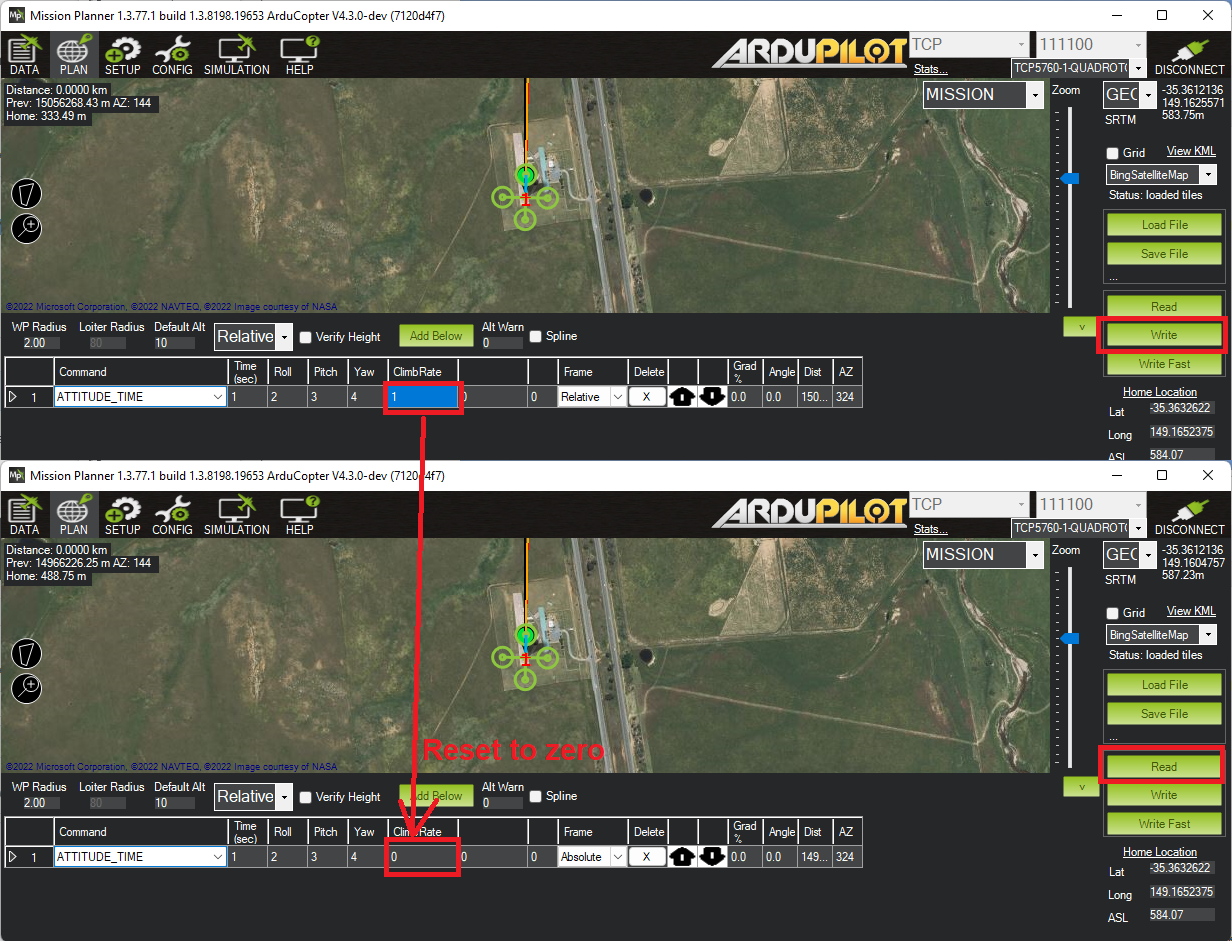 I suspect we will...