openTCS-NeNa
 openTCS-NeNa copied to clipboard
openTCS-NeNa copied to clipboard
An open-source ROS 2 vehicle driver for OpenTCS

Hi,I am using agv vehicle ,gazeboo,rviz in ros1 and opentcs in ros2 and connection done by ros1 bridge and while running open tcs in facing vehicle unavailable under ros2 adapter...
It works fine on 64bit x86 boards. However, it does not work on aarch64 (arm) board. Do you know how to solve it?
Hello 1. When I select bus 1 in the kernel control center, there is [no vehicle information in the vehicle properties panel](url). 2. How to start rviz? Thank you. https://github.com/DengSC0504/picture/blob/main/20210825144652.png
Vehicle movement running continuously manner. It is look like breaking the movement and finally reaching the goal as well as getting status SUCCEEDED
Hi, How to configure and monitor real AGV battery on OpenTCS
Hi , I am not able to get accurate calibration on predefined path...for reference attached the image. 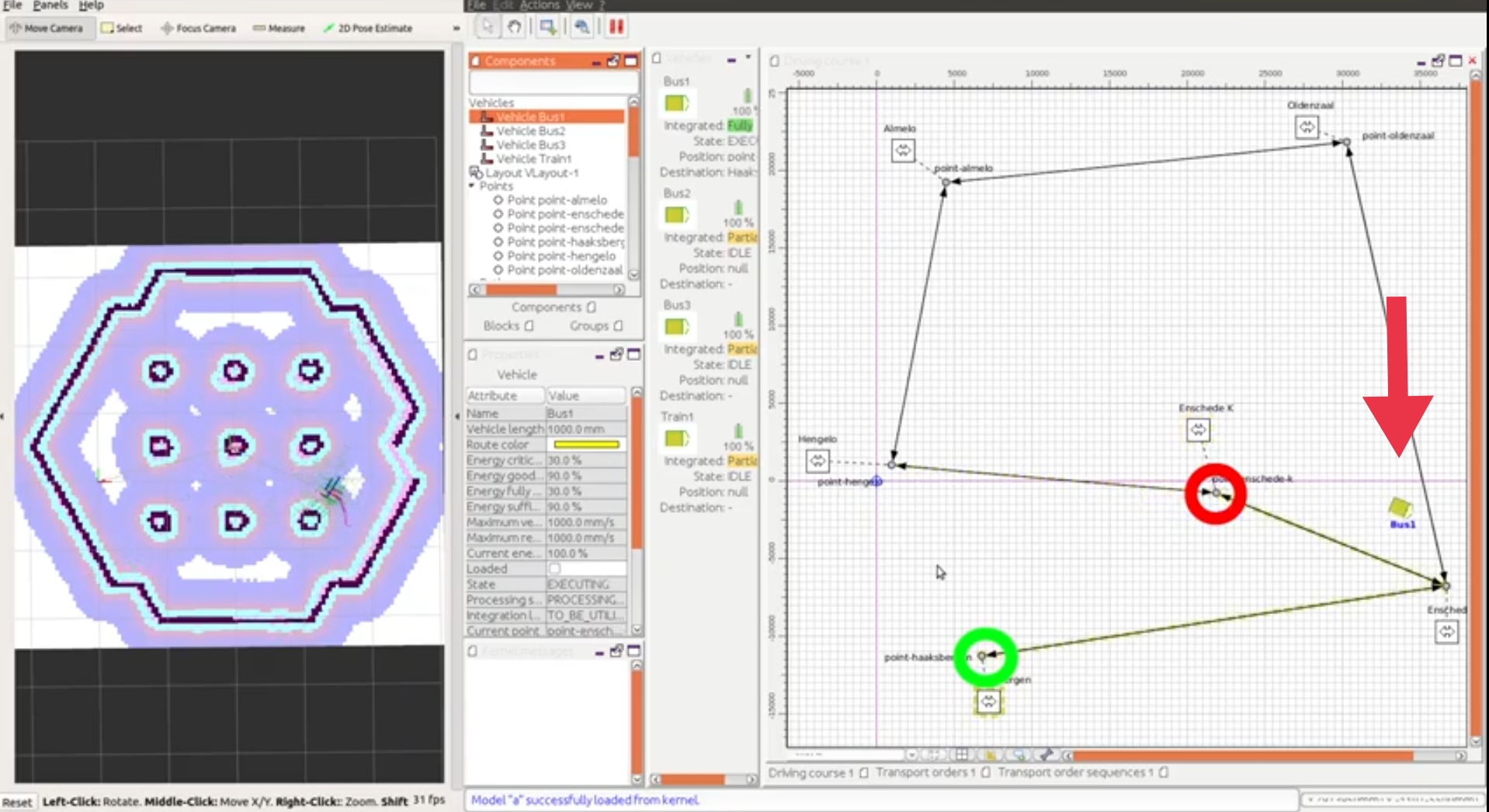
When using the scaling option in the driver, the comm adapter panel displays the scaled vehicle coordinates, not the real coordinates as determined by the AMCL node
Metadata
Owner
Metadata
An open-source ROS 2 vehicle driver for OpenTCS