shape_based_matching
 shape_based_matching copied to clipboard
shape_based_matching copied to clipboard
try to implement halcon shape based matching, refer to machine vision algorithms and applications, page 317 3.11.5, written by halcon engineers
与Halcon FindShapeModel进行对比发现,Line2Dup 的速度比Halcon FindShapeModel快,特别是模板越大越明显。不知道是不是假象。但是也发现,匹配稳定性没有Halcon高,会出现误判。   
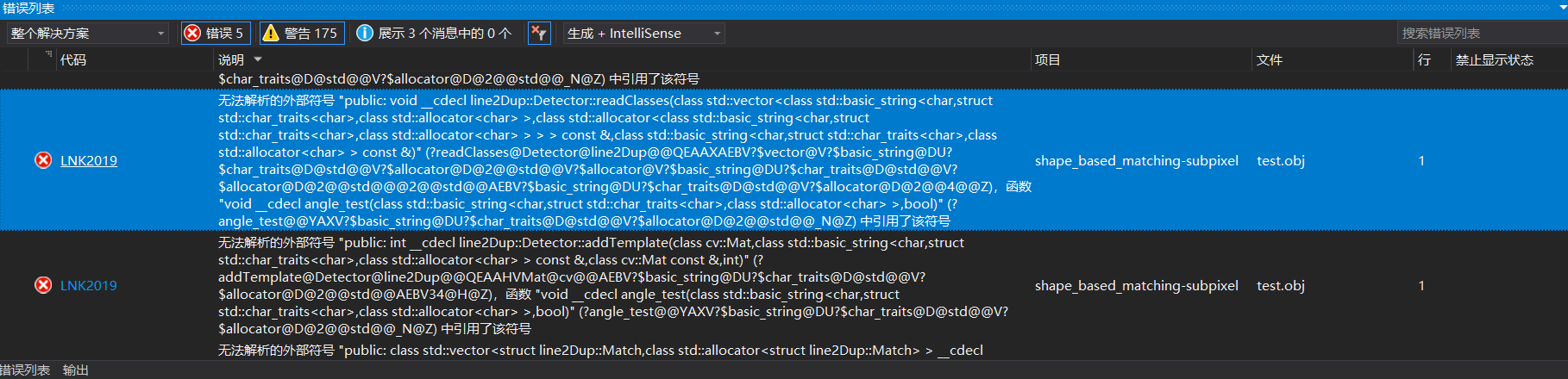
一定要用opencv 3.0吗? # opencv set(CMAKE_PREFIX_PATH ${CMAKE_PREFIX_PATH} /opt/ros/kinetic) find_package(OpenCV 3 REQUIRED) include_directories(${OpenCV_INCLUDE_DIRS}) 默认配置如上,如何在CMakeLists.txt修改opencv 配置为4.5.5? 我装的最新版OpenCV 4.5.5, 路径在D:\OpenCV\install\opencv\build\x64\vc15,当运行CMake时,得到以下错误提示。 CMake Deprecation Warning at CMakeLists.txt:1 (cmake_minimum_required): Compatibility with CMake < 2.8.12 will be removed...
您好,我使用Cmake-gui嘗試建置專案。 我的OpenCV安裝路徑 : C:/OpenCV3.0 CMakeLists.txt中 : ... # opencv set(CMAKE_PREFIX_PATH ${CMAKE_PREFIX_PATH} C:/OpenCV3.0/opencv/build) find_package(OpenCV 3 REQUIRED) include_directories(${OpenCV_INCLUDE_DIRS}) ... Configure第一次結果 : OpenCV ARCH: x86 OpenCV RUNTIME: OpenCV STATIC: ON CMake Warning at...
环境配置问题?

一开始提示 :C1083 无法打开包括文件: "Eigen/Core": No such file or directory 下载eigen-3.4.0并设置属性包含目录后提示 “项不会计算为接受2个参数的函数” ,OPenCv版本是Opencv 3.4.16
此演算法是基於Normalized Cross Correlation實現的算法,在不是太複雜的的環境下可以有效地替代ShapeBasedMatching,內部也不難理解,無SIMD,效能能夠跟上商用函示庫的相同算法,只是把OpenCV用到極限,花幾天就能讀透 [github連結](https://github.com/DennisLiu1993/Fastest_Image_Pattern_Matching) 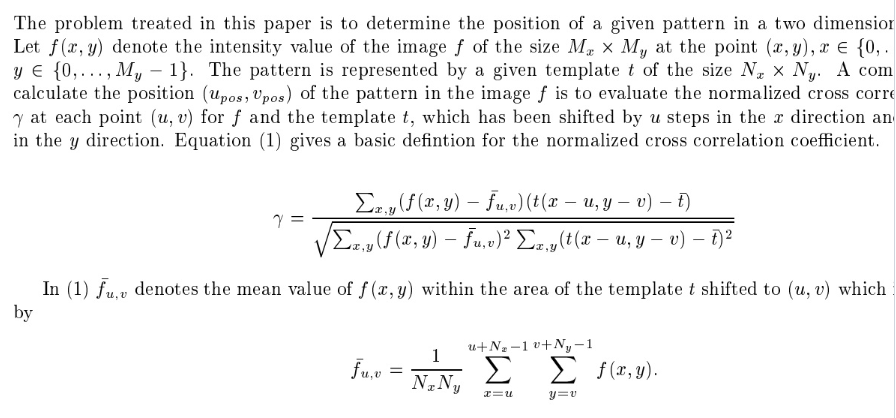 執行結果示例: 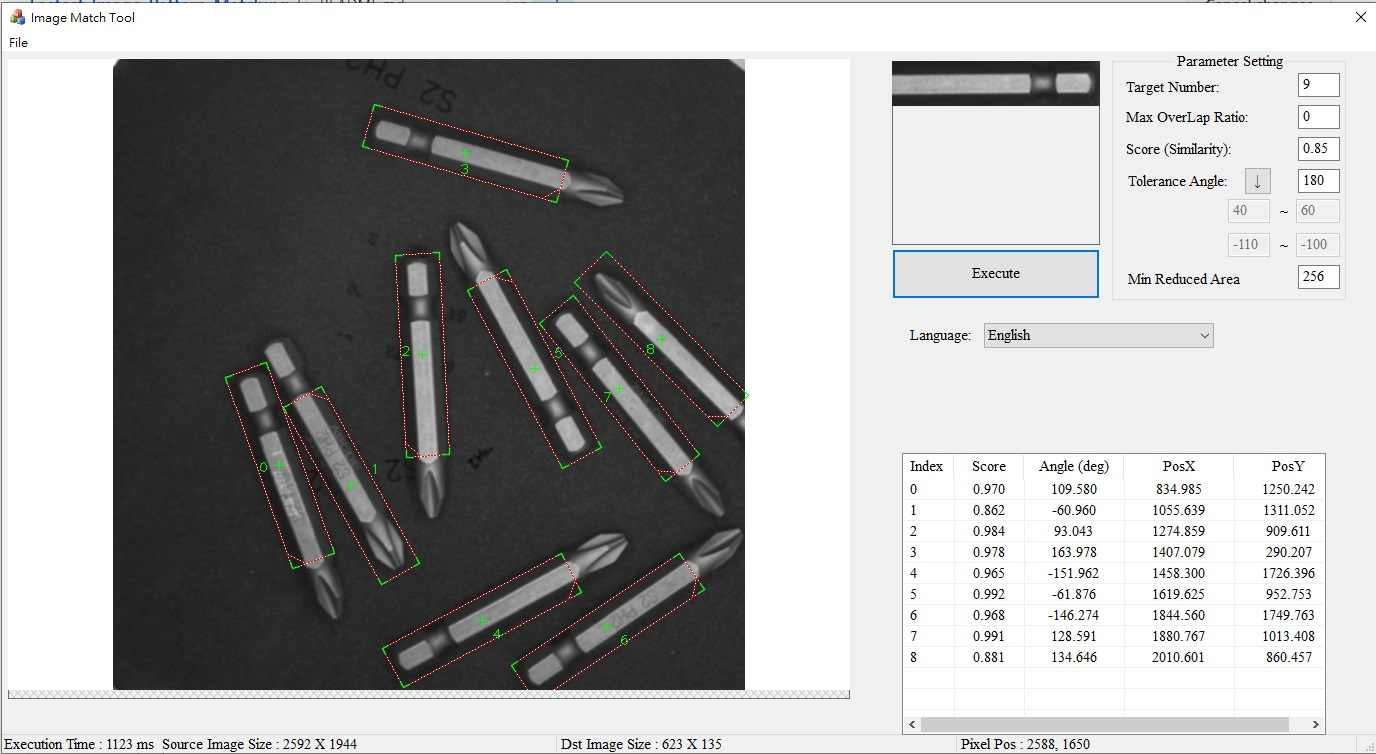
还有就是什么样的标准作为最佳匹配结果比较好呢,可能分数都到100了,我用ICP纠正,然后我以纠正的值最小的时候作为最佳的角度及位置点,出现了这种情况。
在机器视觉领域
在机器视觉领域,中国一直被halcon,康耐视和基恩士垄断。良心的我自主研发机器视觉自动化软件。在缺损检测领域有着独到的经验。 目前我的软件优势: 1、定位技术上不输halcon。 2、专利检测算法pww特征提取。可以将颜色纹理量化后提取区域轮廓计算量化的面积。 3、图像制程采用多层次定位+pww特征提取检测。比深度学习更可靠。 4、采用流程图和决策图的全中文运动制程。比plc更简单。 5、保留着halcon接口。支持halcon工程师的二次开发使用。 https://download.csdn.net/download/pww71/85093101 https://download.csdn.net/download/pww71/62047145 链接:https://pan.baidu.com/s/1vsTptn_pvtbK2sDhWVCZJg 提取码:1234 当前市场上很多类似软件和我的比差距很大 。首先他们的功能过于庞大,而且不够通用。学习和操作不是普通人能短时间掌握的。而我的软件优势明显。 就是定位和检测。其他的任何算子不论是halcon还是其他厂商的算子都可以定制。从外部接口导入到框架内。定位和检测都是自主研发,检测直接量化颜色纹理和区域轮廓进行分析,是我申报专利的算法。因此参数固定和简单。当然比深度学习参数还是麻烦一点点。但是效果比深度学习更稳定。 一般情况下,人眼识别都是颜色纹理和区域轮廓这些基本特征。所以人眼能识别的,基本上我的检测就能识别。而且定位采用多层次定位,在固定位的颜色纹理和区域轮廓上分析基本上可以满足市场上百分之90的缺损检测需求。 另外 我的框架是仿照操作系统的架构,支持任何软件和硬件,只要按照我的接口标准写驱动就可以融入框架。 所以 对于任何高速电机和板卡,3d相机,激光检测设备等等。 都可以融入我的框架。我的内部就只负责客户制程和指挥调度各个模块。 现在操作系统对各个硬件软件的支持也是通过开放的接口。我也是这样做的,对于高级开发应用还是需要定制的。而对于大量通用的检测。直接可以让工人制程就可以完成。