Mechali Omar
Mechali Omar
Hello guys, Could you make a demo on RRT* for path planning instead of A* with source code and share it
Hi, could we implement this on DJI 100 drone ?
Hello, I am also planning to do the same as you . Had you solved the problem. I see that the authors are no longer answering our questions !!!!
Thanks a lot for your precise answer. In our lab we have a visual-inertial sensor (it contains bothe camera and IMU ), we are preparing to use it for the...
ok, thank you for your response . I really appreciate that.
Here is my launch file , but it's not working [myfile.txt](https://github.com/ethz-asl/voxblox/files/3131190/myfile.txt) I'm planning to use this camera: https://www.mynteye.com/products/mynt-eye-stereo-camera
@helon I think I dont neet to use because I'm using the same sensor for point cloud and IMU data acquisition. @ZacharyTaylor I created a node to acquire data from...
@ZacharyTaylor *** ok I understand. SO in the next step I'll try to use ROVIO for the 6 DOF pose estimation as it is illustrated in the following image: 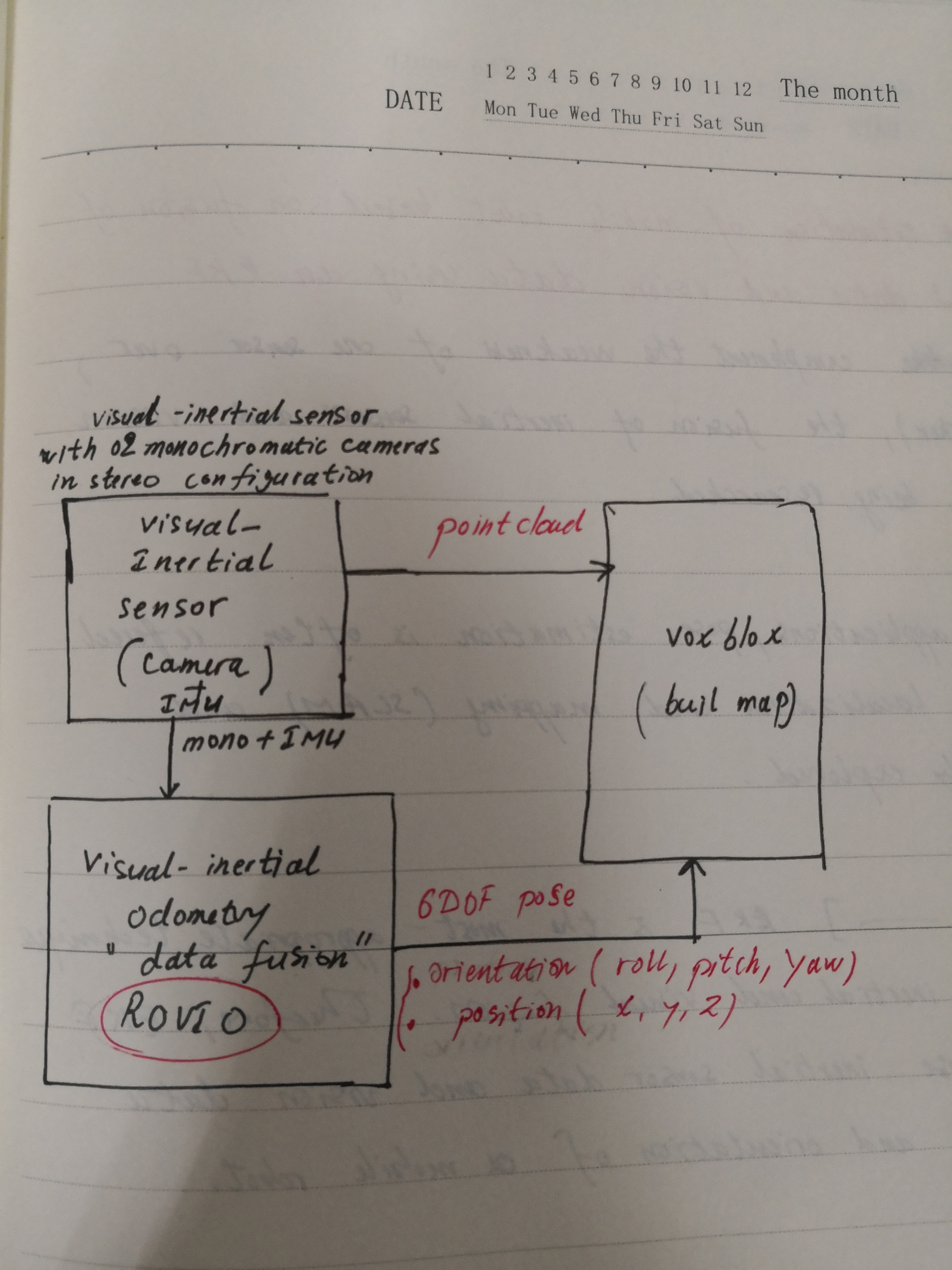...
@hyclover. It has been a long time. I canceled that work. Good luck
hello guys, I'm new here. I have been following the tutorial step by step in https://github.com/ethz-asl/mav_voxblox_planning , but unfortunately I can't find out how to solve a problem that I...