Immanuel Martini
Immanuel Martini

It would be helpful if a controller that does not intend to claim a resource could not only read the actual position but also the commanded position. Something like ```...
## Description Just removing some duplicate code. (backport) ### Things to add, update or check by the maintainers before this PR can be merged. * [x] Public api function documentation...
## Description These changes fix the termination of a program on calling `Robot._release()` twice. (backport from noetic-devel) ### Things to add, update or check by the maintainers before this PR...
Target: #311 Looks promising, but needs more investigation. The pictures below show that the oscillations at the acceleration-part of the LIN trajectory are dissolved. Before: 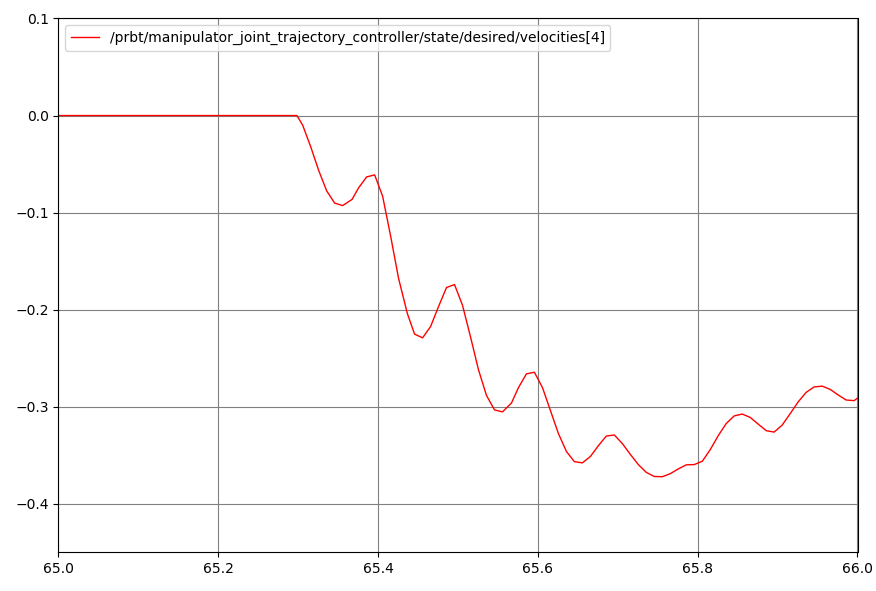 After: 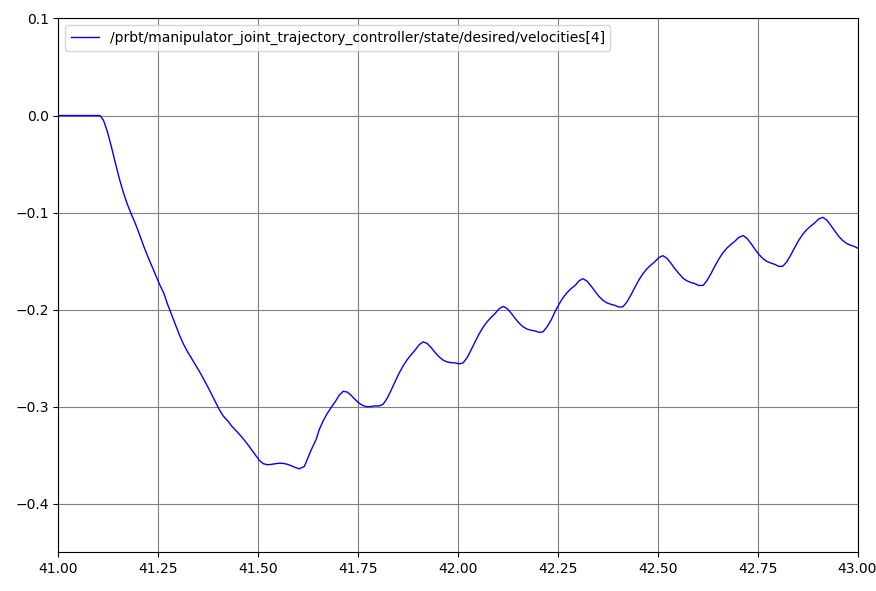
Needs review.
### Commit 831fce5c230a07c54e7db9f770adc8f436e1d533 ### Steps to reproduce Start real robot. Switch into operation mode T1. Command a movement (e.g. PTP) through the Python API. Choose velocity scale `10`. ### Expected...
related: #98 ### Steps to reproduce 1. Modify urdf such that `prbt_base` does not match root-link `world` 2. Execute a ptp pose command without reference frame ### Expected behavior Robot...
Visualize the different vectors and angles (and their relation) that are computed in `path_circle_generator.cpp`. Especially, this should make the use of `KDL::Path_Circle` more easily comprehendable.
We need a uniform way of handling the gripper in tests. Currently we are circumventing the problem: https://github.com/PilzDE/pilz_industrial_motion/blob/6cce6beb3b35060d2b04340898e4c9dc4381a0c0/pilz_trajectory_generation/test/unittest_trajectory_generator_circ.cpp#L440 The following options could be considered: 1. All tests are run with...