lilrookie76
lilrookie76

您好,我在室外场景尝试使用标定,但是在使用config_outdoor.yaml进行标定时(也就是尝试过使用indoor yaml文件不会出现的错误),在迭代完成计算结果的时候会出现一个错误,如图1,导致无法输出结果: 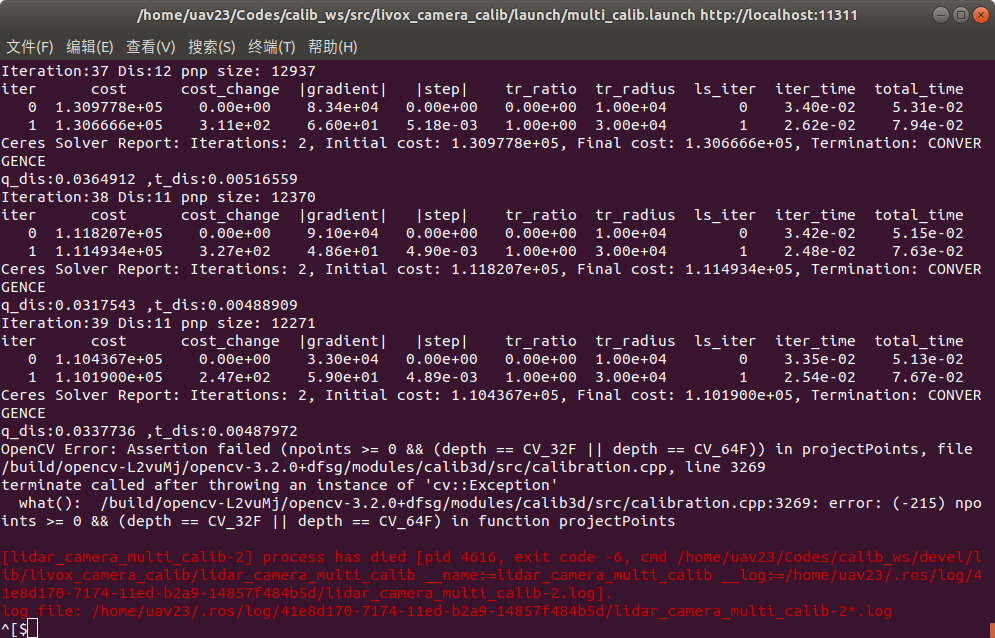 另外不管使用哪种config的时候在粗标定结束后会无法正常使用rviz,报错如下:  希望得到您的回复,谢谢!
 rt, in lib/plane_segment.cpp,memory leak at entering the loop for the second time.(after line 315 in my pic, running command in your guide with rgb and depth image in sample...
in another word, does it assume the sensor is always parallel to the ground? I found that when my dataset lidar tilted significantly all the points became non-ground points.