ZealerLu
ZealerLu
> 首先我很菜很菜,研究了好一段时间源码,发现PID我没理解,如图  请问dce.integralVel项有什么意义?好像在固件里因为dce.kv为0所以此项一直不起作用。 另外主机获取舵机速度会返回有效值吗? 转速的计算依靠`Motor::UpdateVelocity()`接口,不过当前程序里并没有调用这个接口,所以速度信息无法返回有效值。要是用的话,可以在控制中断回调里调用`Motor::UpdateVelocity()`,就能对角度差分得到转速。 我理解程序中PID将位置环和速度环写在一起了,其中dce.integralVel是速度环的积分量,由于转速环在稳态状态下只有积分量起作用,所以这里把比例项简化了,再将两环写在一起就是截图中的样子了。
> 感谢您的解惑 有豁然开朗的感觉 我再追文一句 系数是0 意思是暂时不用速度环起作用的意思吗 另外 函数调用时 _inputVel传入参数是0 意思是此时刻的速度为0,再和期望速度做差得出速度误差吗? > > > > 首先我很菜很菜,研究了好一段时间源码,发现PID我没理解,如图  请问dce.integralVel项有什么意义?好像在固件里因为dce.kv为0所以此项一直不起作用。 另外主机获取舵机速度会返回有效值吗? > > > > > > 转速的计算依靠`Motor::UpdateVelocity()`接口,不过当前程序里并没有调用这个接口,所以速度信息无法返回有效值。要是用的话,可以在控制中断回调里调用`Motor::UpdateVelocity()`,就能对角度差分得到转速。 > > 我理解程序中PID将位置环和速度环写在一起了,其中dce.integralVel是速度环的积分量,由于转速环在稳态状态下只有积分量起作用,所以这里把比例项简化了,再将两环写在一起就是截图中的样子了。 > >...
> 请问如何理解最大转矩的限制,用最大力矩作为位置环PI后的输出结果的限幅,这样可以做到限制输出力矩吗? 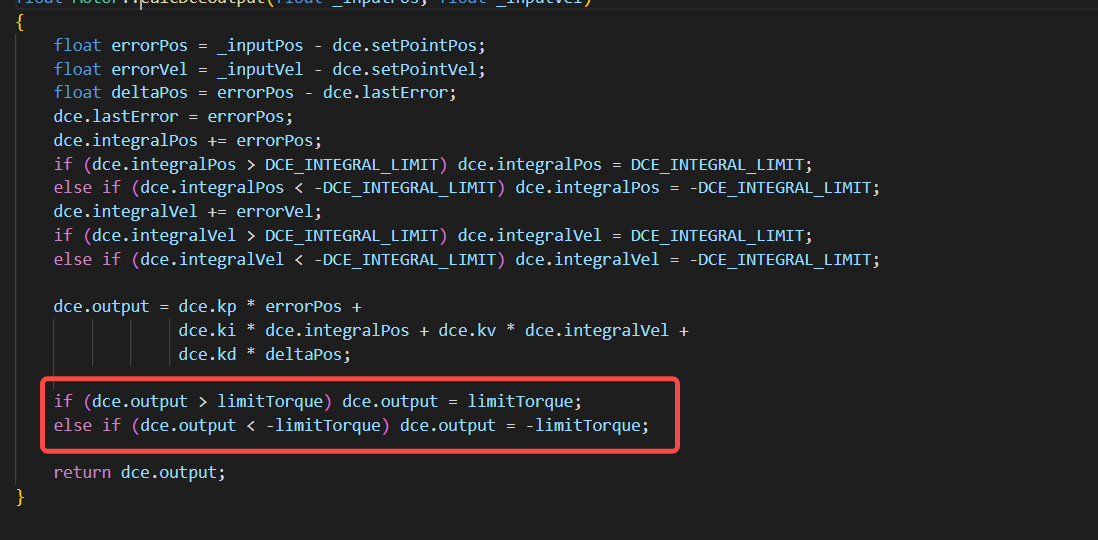 可以看到的是位置环PI后的结果,作为电机的PWM占空比赋值过去了 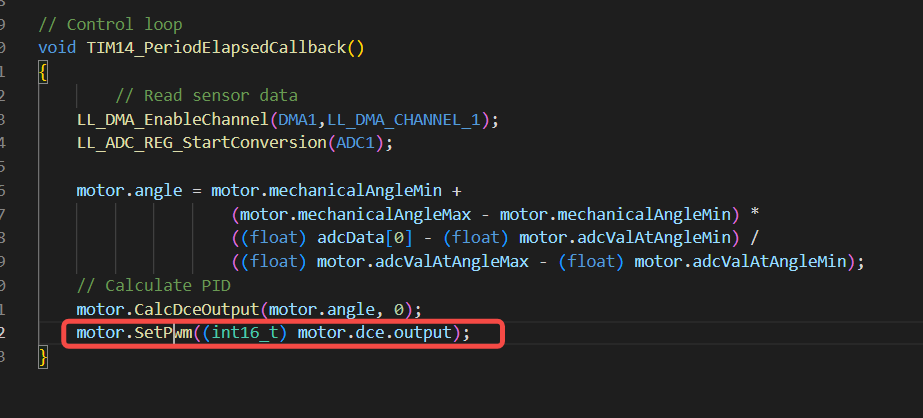 仔细看这里的位置环和速度环PID是合并到一起了,所以控制上看PID输出值的物理意义是电流值,这里电流环被简化,电流值等效于PWM的占空比,而根据电机的转矩方程可知,转矩正比于电流,所以限制了最大电流输出值,即限制了最大转矩
> > > > 不太理解PID的输出值物理意义是电流值 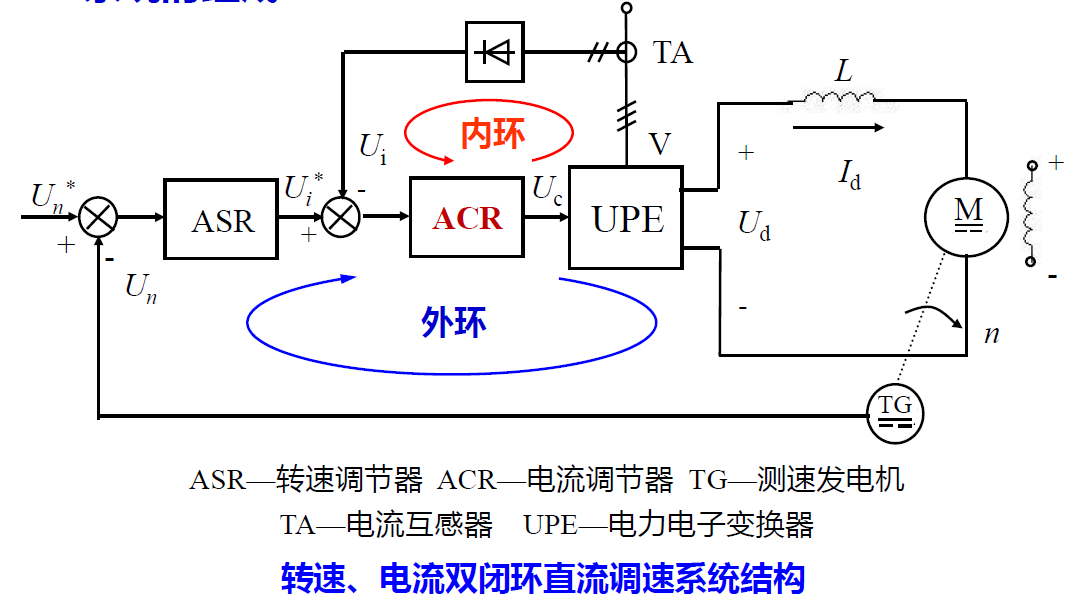 经典的双环控制系统,应该是电压环(转速环)作为外环,电压环的输出作为电流环的给定,外环的输出做限幅,则电流的给定就会有限幅,电流环作为内环也需要采集电流的实际值才可以进行内环环路的调节。 稚晖君的舵机驱动板中没有采集电流的实际值,所以应该也不存在电流环呀,是如何实现转矩限幅的呢? 麻烦大佬解答一下,对这块的认识可能有误区 理论上是你图中的样子,转速转矩双环控制的转速环内环是电流环(转矩环),电流环的给定由转速环输出得到。 但是具体到这个小舵机上来说,这么小的玩意,对转矩控制精度也不需要量化,没必要增加电流反馈电路来做电流环(转矩环),所以电流控制是开环的,系统中也就只有位置环+转速环+开环电流输出,于是最后输出给PWM就是期望的电流。 所以限制电流即限制了转矩。
> > > > > > > > > > > > > 不太理解PID的输出值物理意义是电流值  经典的双环控制系统,应该是电压环(转速环)作为外环,电压环的输出作为电流环的给定,外环的输出做限幅,则电流的给定就会有限幅,电流环作为内环也需要采集电流的实际值才可以进行内环环路的调节。 稚晖君的舵机驱动板中没有采集电流的实际值,所以应该也不存在电流环呀,是如何实现转矩限幅的呢? 麻烦大佬解答一下,对这块的认识可能有误区 > > > > > > 理论上是你图中的样子,转速转矩双环控制的转速环内环是电流环(转矩环),电流环的给定由转速环输出得到。 > > 但是具体到这个小舵机上来说,这么小的玩意,对转矩控制精度也不需要量化,没必要增加电流反馈电路来做电流环(转矩环),所以电流控制是开环的,系统中也就只有位置环+转速环+开环电流输出,于是最后输出给PWM就是期望的电流。 > >...
> 各位大佬,我想到一个点。现在舵机用的是电位器,定位。旋转的范围限制在一圈以内。有没有办法,加一个360度的角度传感器,这样就可以,对旋转角度没有限制,可以一直连续旋转下去了,并且可以精确定位位置。有没有好的角度传感器推荐的? 可以用线性霍尔,只是轴端还需要安装个磁铁,且相对位置还要满足要求,那么小的空间不好实现
@li-gittt 加工件中 的齿轮/连杆/胳臂这些小零件可以合并到一个模型里,不然光固化按每件最小质量收费太亏,薅羊毛薅得彻底。  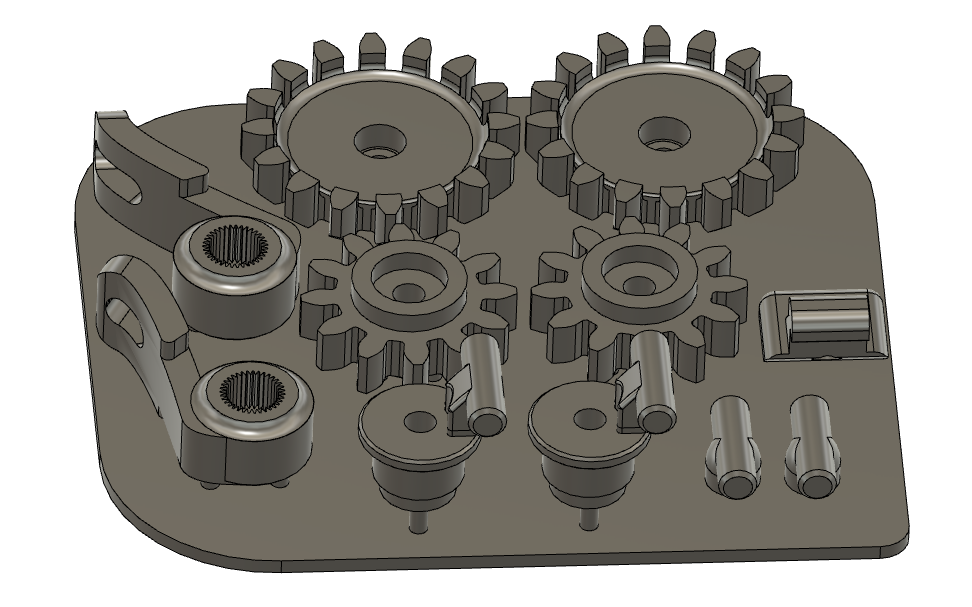
> @leazer 敢问大佬能不能共享下这个模型,咱只会sharper3D没用过PC端的建模软件 给, [尼龙打印加工.zip](https://github.com/peng-zhihui/ElectronBot/files/8485868/default.zip) [手臂打印加工.zip](https://github.com/peng-zhihui/ElectronBot/files/8485869/default.zip)
@tony2ty 是直接替换的吗?我看到STM32F042和STM32030 20pin的是pintopin的吧?昨晚我也新画了个,换了个电源(手头没有),另外周末尝试在STM8S003上做了移植,目前还差I2C通讯协议稳定性部分没弄好了
@yoy52012 [README.md](https://github.com/ScanNet/ScanNet/blob/master/README.md) > If you would like to download the ScanNet data, please fill out an agreement to [the ScanNet Terms of Use](http://dovahkiin.stanford.edu/scannet-public/ScanNet_TOS.pdf) and send it to us at [email protected].