How to do benchmark on KITTI datasets
Thx for your great working! I want to do some benchmark based on KITTI datasets to check the accuracy of this method. But I do not know how to get the trajectory of mapping. Looking forward to your help. Thx in advance.
Hi @HongweiSunny , You may need to convert KITTI to rosbag. I'm not sure, but I think there should be some scripts to do that on github...
I have now a rosbag that has all Kitti sequence 08 from the odometry dataset, but when I ran it with hdl_---_kit.launch with configuring the static_tf_publisher for Velodyne and cameras data, it didn't work as properly.
Most properly there's an issue with the tf because of time difference.
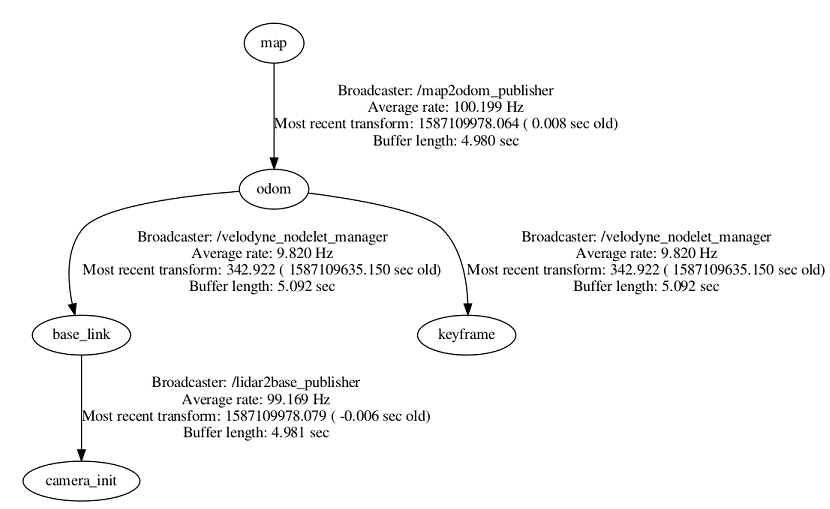
And here's the TF tree
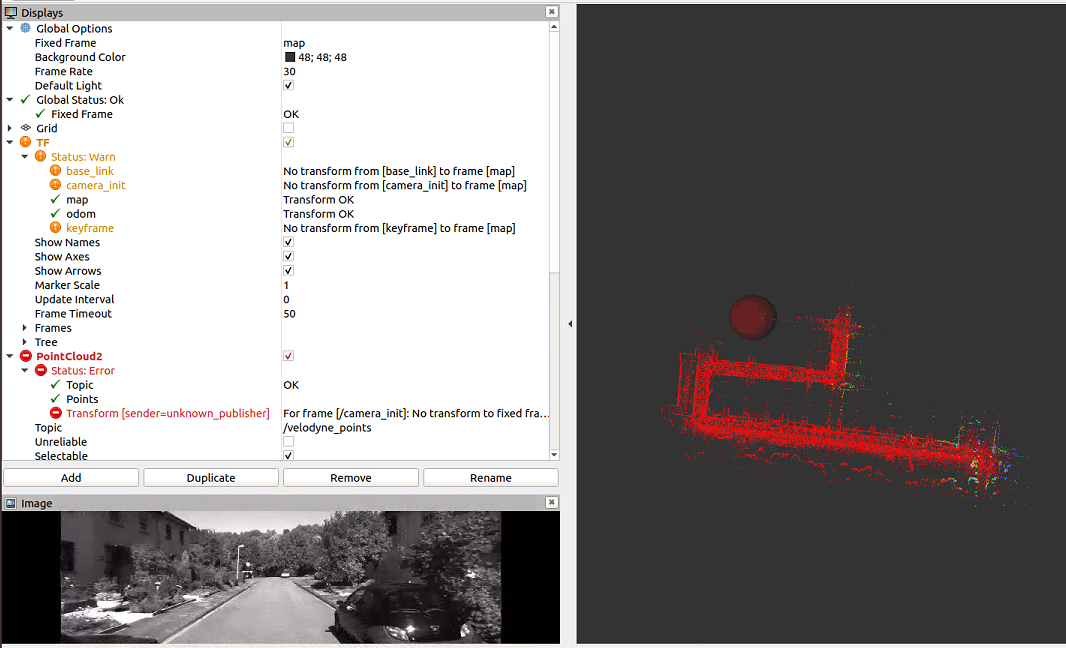
And from RVIZ I got those errors as shown below