johannesW
johannesW
Hello guys, what is the current status of this topic? We would need a MoveIt support for the UR16e. Is there a chance to implement this in the near future?...
I thought a bit about a possible xml-schema. How about this version. I'm not quite sure about backward compatibility. ``` ``` The idea is to have an optional element 'SteadyState'...
Looks good to me. 😃 Yes you are right, the final speed is necessary for this steady state feature. If you could make a new build with this experimental extension,...
Alright, I will test it soon 👍 I would say that the creator of the scenario has to care about the correct steady state position, otherwise the scenario would not...
Yes that looks reasonable. I think this is a good and more robust approach. 👍 In my use case of the CPTA scenario it's a bit more challenging anyway. Here...
Hi Emil, I tested your steady state - implementation of the "TargetDistanceSteadyState" and "TargetTimeSteadyState". It looks good to me. 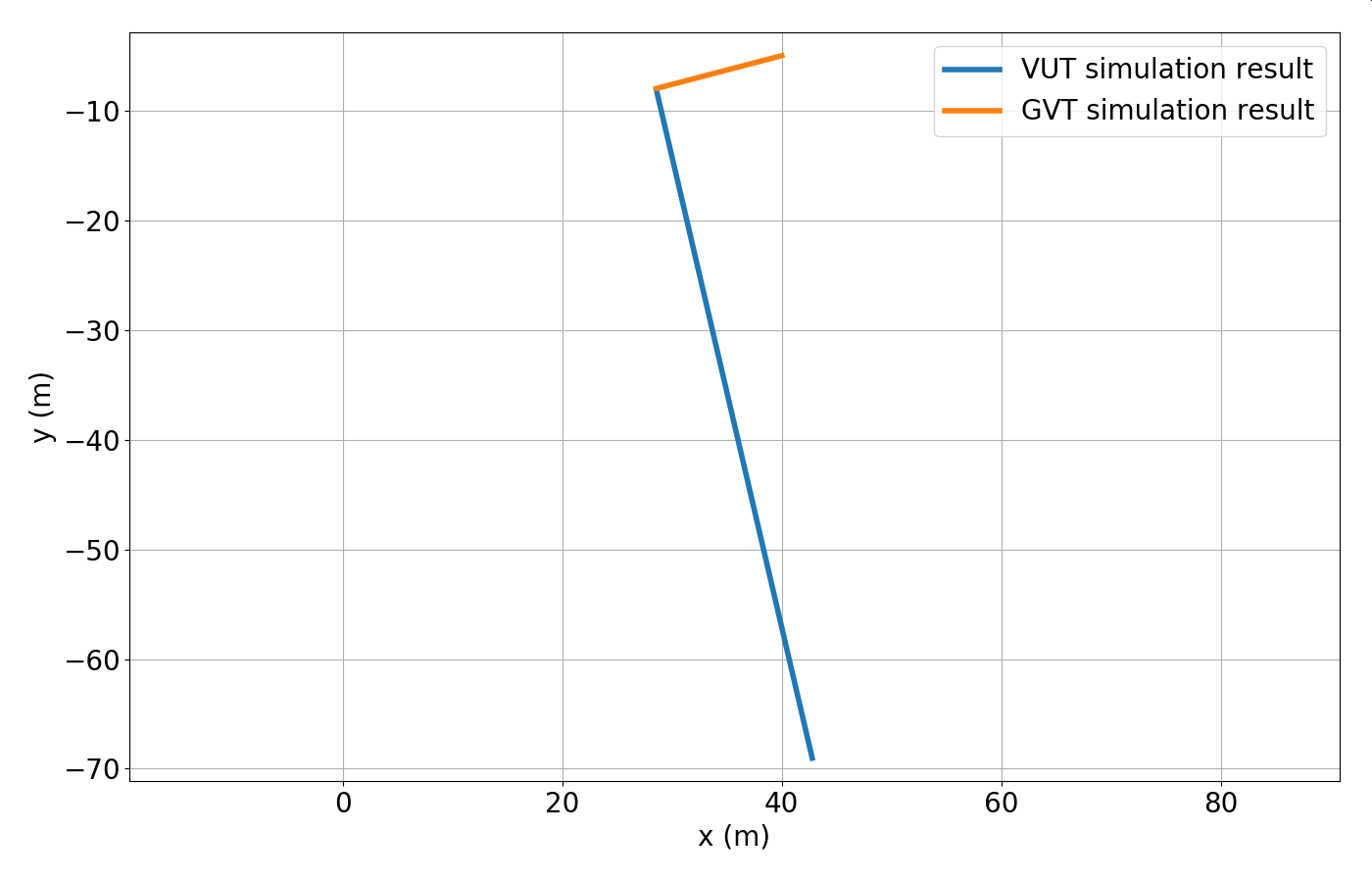 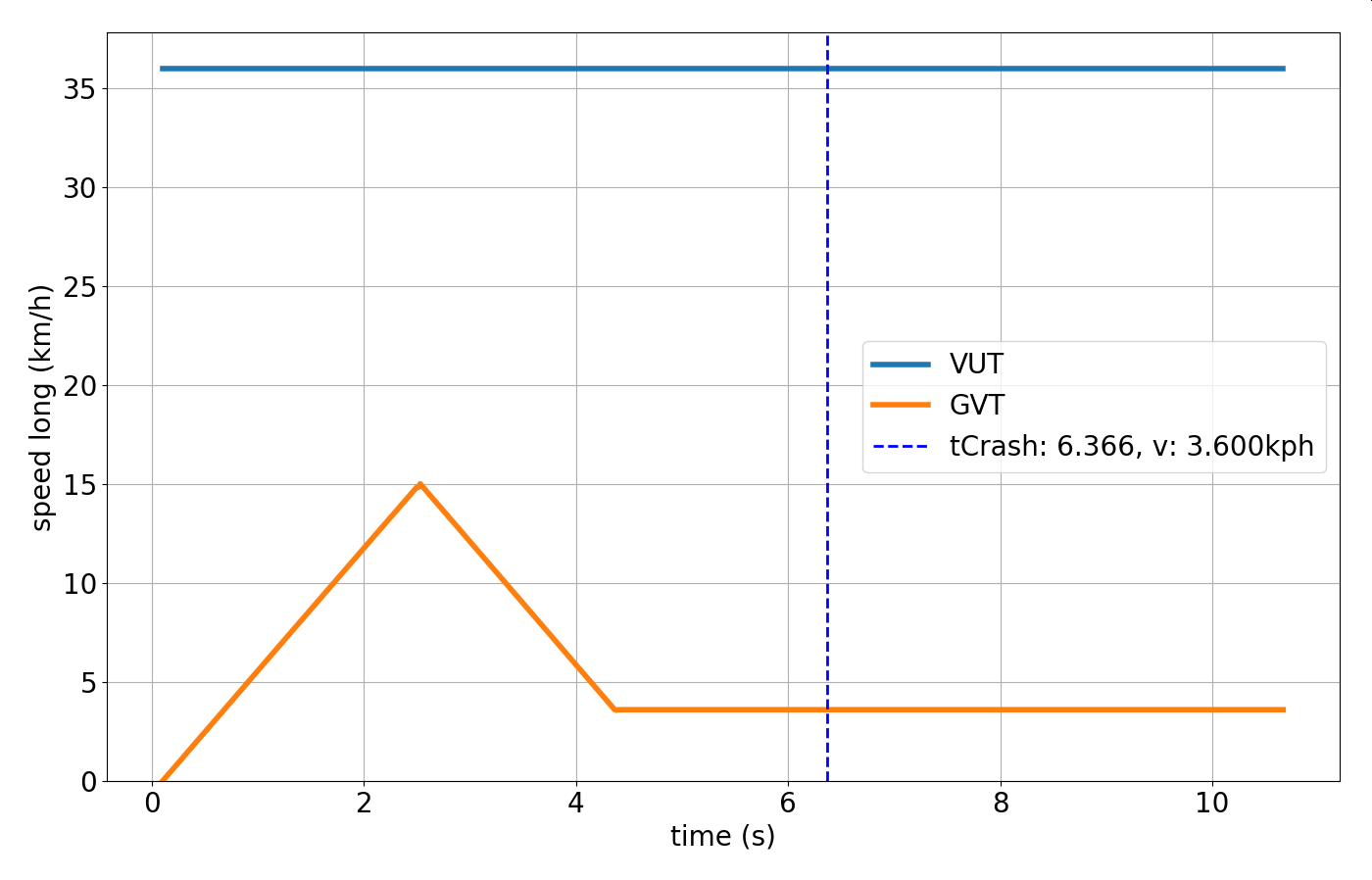 Concerning, the "TargetPositionSteadyState" I have a question. Is it...
Hi, no problem. Yes, I agree with you. For now, the distance- and time steady state definitions are quite sufficient. I still think the position definition would be useful, but...
Hi, I figured out a problem with the newest build (e4648b440c2e9c14d3005bbdfb755b8f11952b18). When I run the 'synch_with_steady_state.xosc' scenario, the simulation freezes after some time. The log file shows no warning or...
Hm, I just tested it on another Windows machine but there the bug does not occur.. I used the "run_synch_with_steady_state.bat" from the release zip. It is probably a problem of...
It always happens at 0.2 s - 0.4 s in the "synch_with_steady_state.xosc" scenario. The bug also happens in my crossing scenarios and the "highway_merge_advanced.xosc" scenario. It is very strange, because...