Open3D-ML

Open3D-ML copied to clipboard
How to predict 3d box with PointPillars when point_cloud_range contains x<0
Checklist
- [X] I have searched for similar issues.
- [X] I have tested with the latest development wheel.
- [X] I have checked the release documentation and the latest documentation (for
masterbranch).
My Question
when i modify pointpillars_kitti.yml to the below. the result is error.
model:
name: PointPillars
ckpt_path: # path/to/your/checkpoint
batcher: "ignore"
point_cloud_range: [-69.12, -39.68, -3, 69.12, 39.68, 1]
...
head:
in_channels: 384
feat_channels: 384
nms_pre: 100
score_thr: 0.1
ranges: [
[-70.4, -39.68, -0.6, 70.4, 39.68, -0.6],
[-70.4, -39.68, -0.6, 70.4, 39.68, -0.6],
[-70.4, -39.68, -1.78, 70.4, 39.68, -1.78]
]
...
augment:
PointShuffle: True
ObjectRangeFilter:
point_cloud_range: [-69.12, -39.68, -3, 69.12, 39.68, 1]
...
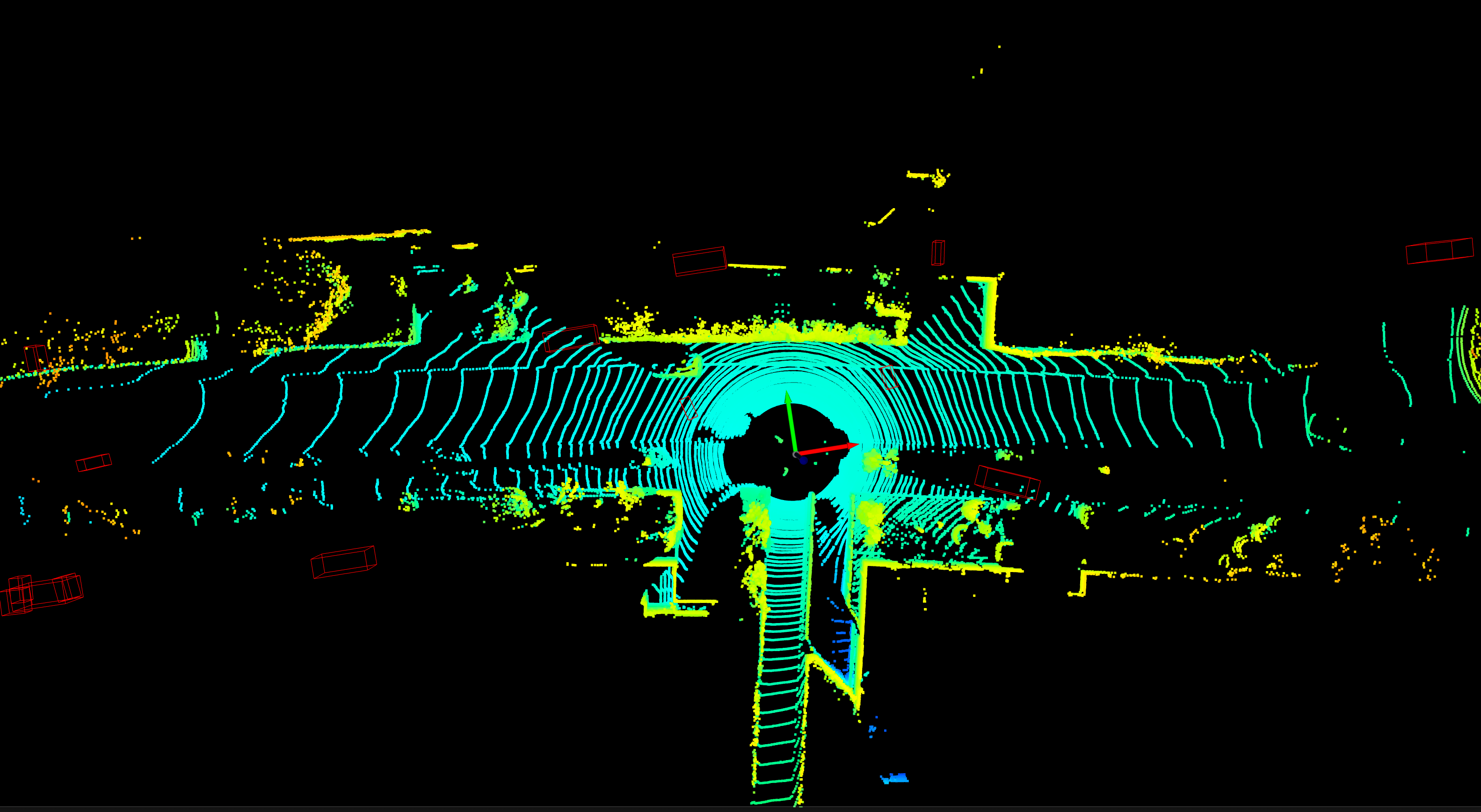
result like this: