Eurico Pedrosa
Eurico Pedrosa
I have never tacked this problem. But I already came accros it. And yes, it is something I am interested in :+1:
Hi, I would like to start by exploring the scan matching approach. Usually a dense approach is computationally demanding, but I would like to see how much we can optimize...
Hi @WilliamWoo45, The `slam3d-dev` is _not_ workable. Right now it is not a priority for me. Furthermore, I do not have access to a 3D LiDAR, which also reduces the...
I have an image that can help the discussing: 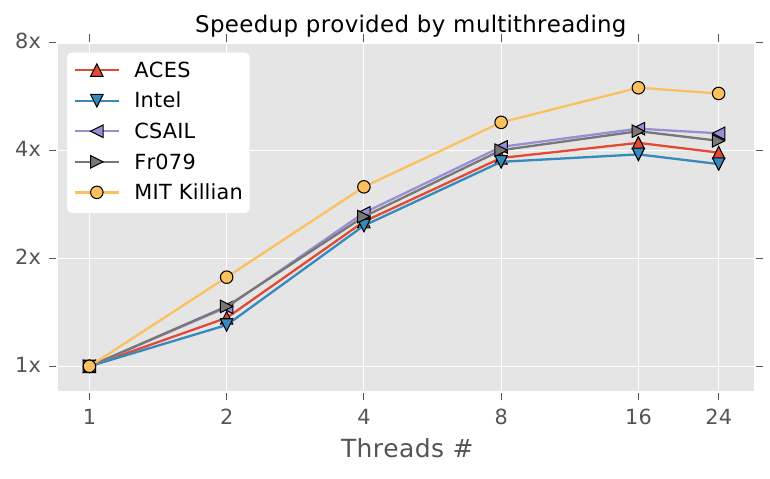 The number of particles is 30. In my opinion there are a few things that can explain these behavior:...
Hi, The distance function is used to calculate the matching error (or residual) and create the gradient that will attract the scan (or surface as I call it in the...
> but how is that being used to match against the map obstacles (walls, etc)? I didn't see a very clear scan matcher so I figured it was a feature...
> So if you're just in a long fairly homogenous aisle, really its just taking the word of god of the odometry for the lengthwise shift and only fitting the...
Thank you for your comments @msadowski. Would you be kind to reproduce those gifs with a top down orthogonal view? It helps with the troubleshooting. > in fact the box...
Hi @jojo89776, thanks for you kind words about LaMa. I usually do not have an "Extrapolation Error" when using the localization node. Commenting the **tf-broadcaster** will not solve the problem,...
Hi @ryujin62 It looks to be a problem in your initial estimate. You can use RViz to properly set the pose of the robot. If you look at the global...