fix some issues when import URDF of PR2 into blender 3.1 using phobos…
… 1.0.1
fix some issues when importing urdf file into blender such as PR2
Description
- failed to parse link mass in the form:
0.17389 - failed to parse joint parent and child link name in the form:
l_gripper_r_parallel_link andl_gripper_palm_link - failed to parse ratation axis of joint if the axis is specified in the form:
0 0 -1 - failed to creat link from dictionary if the link has no inertial tag
Related Issue
Motivation and Context
when to import PR2 into blender, exceptions are thrown, as the phobos could not parse some links and joints correctly
How Has This Been Tested?
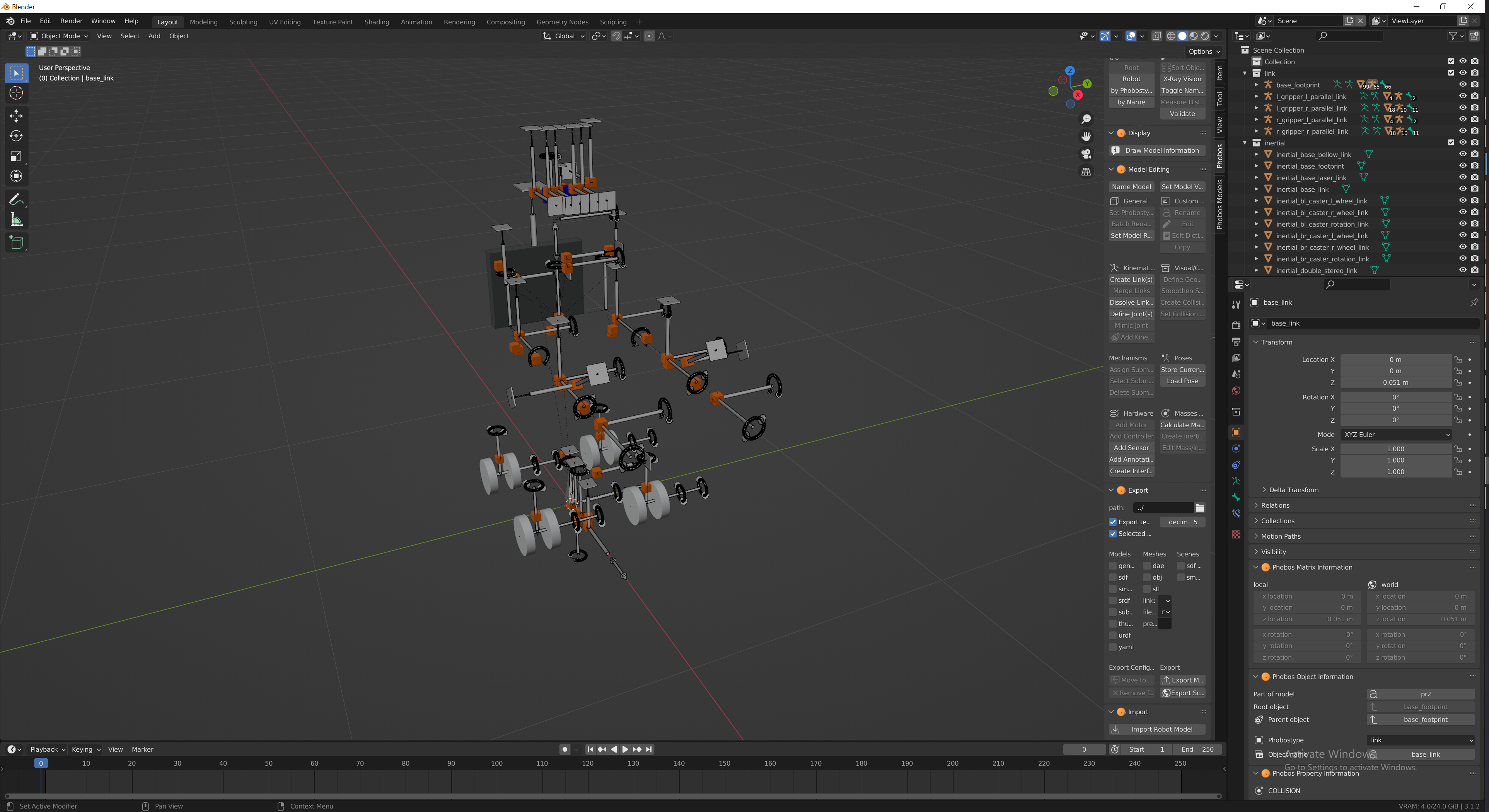
The changes are tested via import PR2 URDF into Blender with Blender version 3.1 and phobos plugin 1.0.1.
Screenshots (if appropriate):

Types of changes
- [x] Bug fix (non-breaking change which fixes an issue)
- [ ] New feature (non-breaking change which adds functionality)
- [ ] Breaking change (fix or feature that would cause existing functionality to change)
Checklist:
- [x] My code follows the code style of this project.
- [ ] My change requires a change to the documentation.
- [ ] I have updated the documentation accordingly.
- [ ] I have read the CONTRIBUTING document.
Thanks, @wanglei-albert , for you contribution, your changes look quite nice. What kind of URDF are you using, your changes look like you are trying to import an SDF. Do you have a link to that URDF?
Do you mean this one? https://github.com/PR2/pr2_common/tree/melodic-devel/pr2_description/urdf Because there the urdf sections in the xacro files look like they are following this convention: http://wiki.ros.org/urdf/XML/link
I am happy to hearing from you, and the truth is that what I try to import is really a URDF.
However, the URDF is not downloaded from somewhere, but generated using the xacro files.
The link of the xacro files is https://github.com/PR2/pr2_common/tree/melodic-devel/pr2_description.
Attached is the URDF file I used, and you may check it.
在 2022-06-16 16:29:20,"Henning Wiedemann" @.***> 写道:
Thanks, @wanglei-albert , for you contribution, your changes look quite nice. What kind of URDF are you using, your changes look like you are trying to import an SDF. Do you have a link to that URDF?
— Reply to this email directly, view it on GitHub, or unsubscribe. You are receiving this because you were mentioned.Message ID: @.***>
Hi @wanglei-albert , thanks again for explaining and your contribution. It seems that the way xacro creates this URDF does not comply to Standard-URDF as described here. As we are moving to v2.0.0 of phobos, your changes do not longer match the internal URDF handling. I suggest that you open an issue for xacro regarding this faulty URDF creation. If your issue persists, pleas open a feature request. For the time being I close this PR.