webots
 webots copied to clipboard
webots copied to clipboard
RpLidarA2 - rotating bugs meansurements
Describe the Bug
While preparing package webots_ros2_husarion I discovered that RpLidarA2 is not working properly.


Here commented this line:
# type "rotating"
I can't reproduce your issue. In the sample world the Lidar seems to work perfectly fine.
Can the problem come from the ROS2 package? Or maybe from RViz? Are you making any transformation to the Lidar data before displaying it?
Could you please provide a minimal example with the failure, so that I can reproduce it?
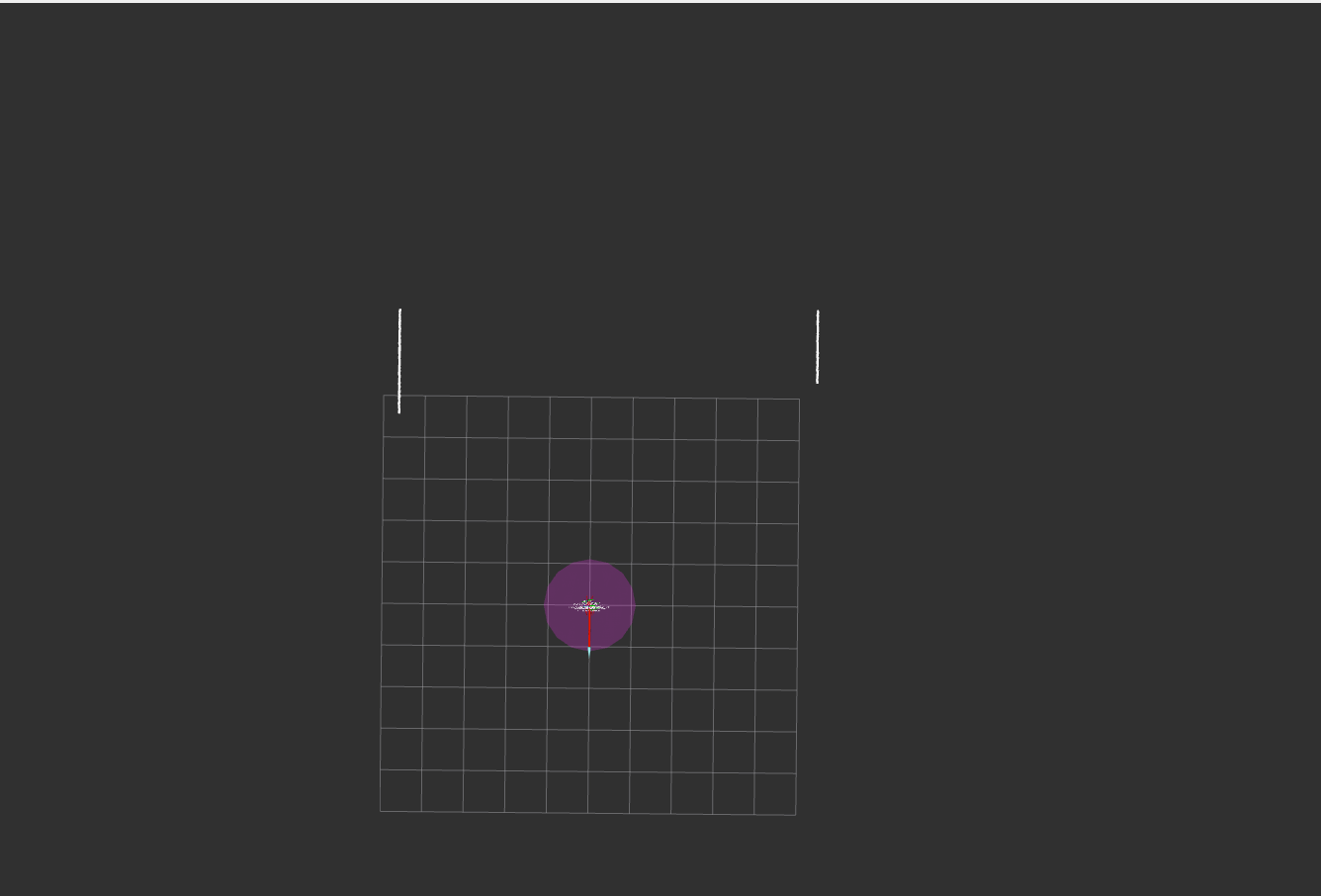
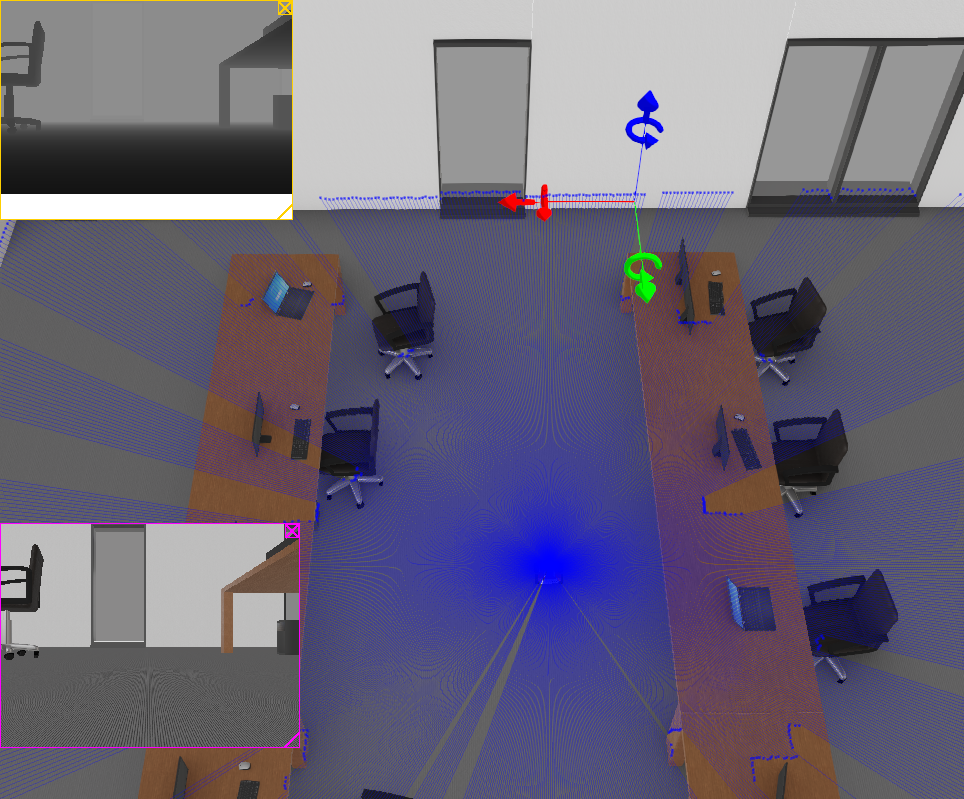
After further investigation on the Lidar and your project (following up our discussion on Discord), there is indeed a bug with the (rotating?) Lidars. Here is what I have observed:
- All Lidars display correctly the point cloud inside Webots, including
RPLidarA2, whatever their field of view is. - As reported by @delihus, the measurements of the Lidar (not the point cloud) are wrong for a field of view of 1.57 on the
RPLidarA2. This corresponds to the/scantopic inwebots_ros2and has only been observed in RViz (for now). Measurements may be wrong in Webots too. - Increasing the field of view to 6.28 fixes the
RPLidarA2measurements. - The point cloud is not correctly displayed in Rviz (
/scan/point_cloudtopic). Points are correct but the complete pattern is rotated by 180 degrees.
I still need to investigate if the wrong measurements are coming from Webots or when writing to webots_ros2 topics.
Thank you @ygoumaz!
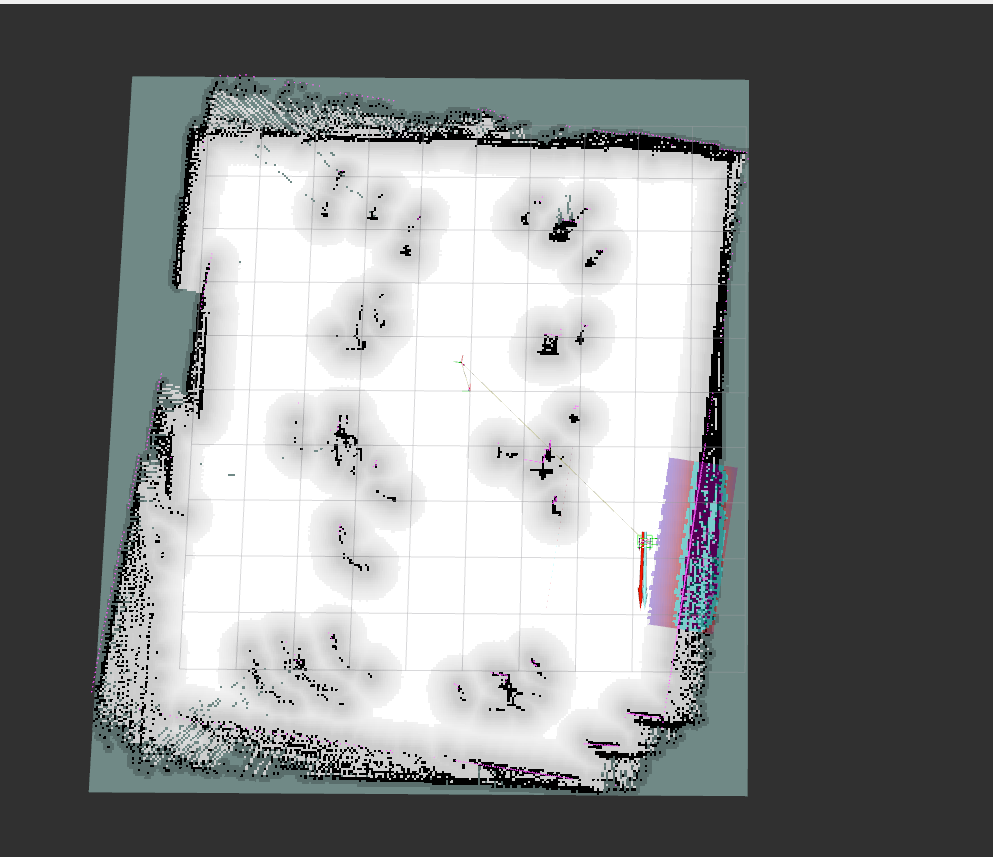
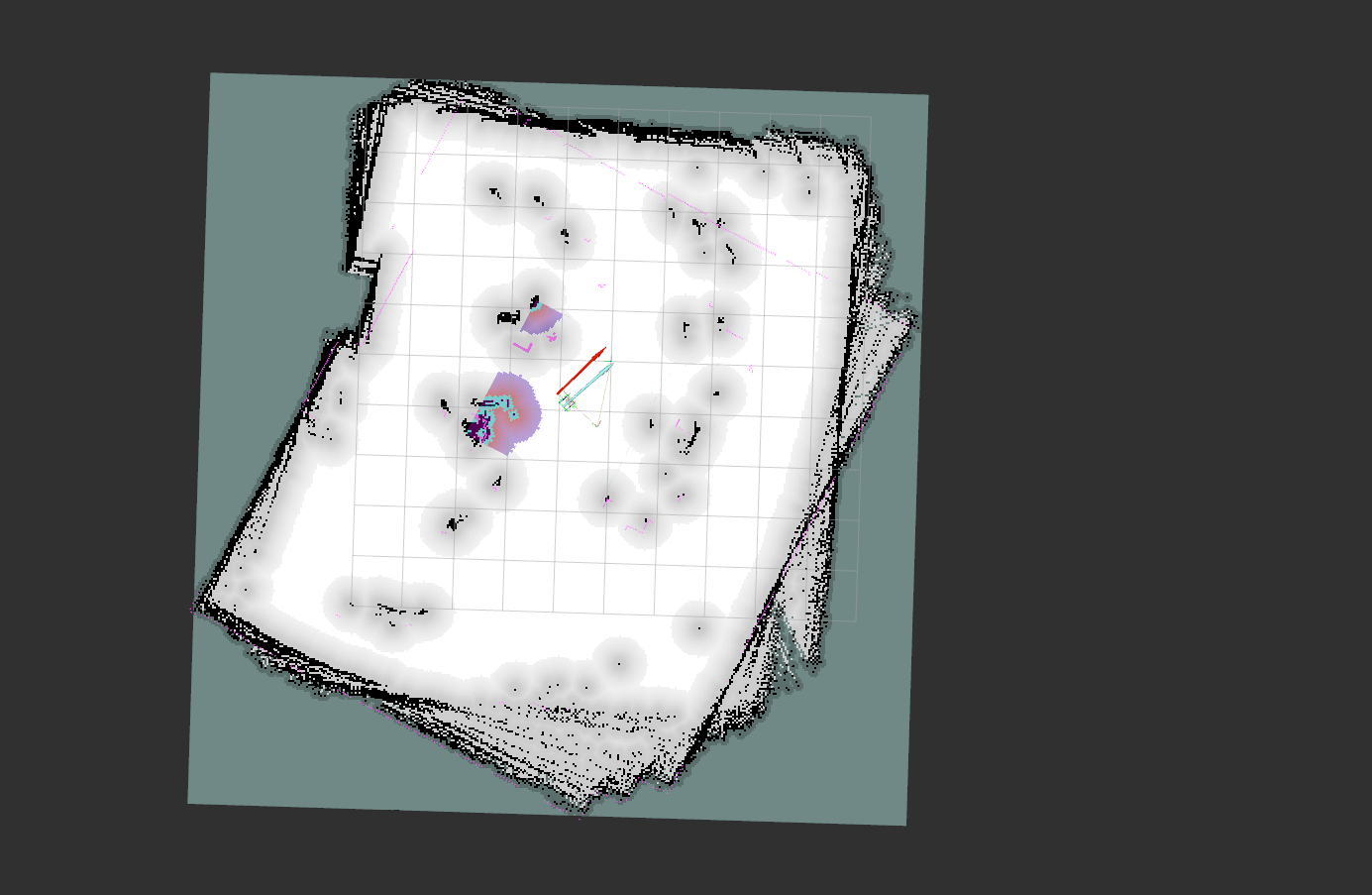
I will also show the others what is happening then slam-toolbox is mapping.
I can't wait. Best regards, Jakub
Hello,
I faced the same issues mentioned using slam_toolbox with Webots. I observed the odometry values coming from the diff_drive node started to drift quite a lot in short time period. As mentioned in the documentation, slam_toolbox requires high quality odometry, so this could be one of the reasons. Also, fine tuning of the config params may be required
I got better results using cartographer out of the box with the turtlebot demo: https://ros2-industrial-workshop.readthedocs.io/en/latest/_source/navigation/ROS2-Cartographer.html. My guess is that the algorithm in cartographer is more robust to noisier odometry.
I hope this could help.
Best regards,
Thank you @ygoumaz!
I will also show the others what is happening then slam-toolbox is mapping.
I can't wait. Best regards, Jakub
Hello, I am using the slam_toolbox for the webots_ros2_tiago demo and I am having same issue as you. how did you fix it?
@shiven2001 Actually I used cartographer_ros instead of slam_toolbox and it does not have this issue