webots
 webots copied to clipboard
webots copied to clipboard
Inaccurate Lidar measurements
Describe the Bug
(3D) Lidar scans are very inaccurate and slightly skewed.
Steps to Reproduce
I've used a Lidar Node as given below and added some default props from Webots.
Lidar {
name "lidar-RSBP"
fieldOfView 6.283185
verticalFieldOfView 3.141593
horizontalResolution 1800
numberOfLayers 64
minRange 0.100000
maxRange 30.000000
noise 0.000011
resolution -1
near 0.050000
}
Expected behavior
Perfect matching laser scans due to infinite resolution settings.
Screenshots
System
- Linux Ubuntu 20.04
- NVIDIA GeForce GTX 1070
Thank you for this bug report. Could you please create a simple example showing this problem and upload it as a ZIP file on this issue?
This world seems to behave the same than your.
Note that I have to increase the near and minRange values. Settings then to smaller value (especially the near 0.1 to 0.01), fix the world for me
hope it could help
Edit : change .zip
@ShuffleWire I think the zip file you provided is not about the correct world. Could you please provide the one about the lidar issue if you still have it?
@ShuffleWire I think the zip file you provided is not about the correct world. Could you please provide the one about the lidar issue if you still have it?
Yes, I've mess up when uploading the file, and took the wrong one ! Fixed it in my message
Thanks
I tried your world with many different settings of minRange, maxRange and near but I can't reproduce the problem. I test on the master branch of Webots. It is possible that the problem has been fixed in a PR in the meantime.
Could you test in the latest nightly version with the settings that were causing wrong measurements and tell me if the problem is still there?
It work indeed fine for my example, so something could have changed.
But we would need @astumpf to post his world to be sure, imo.
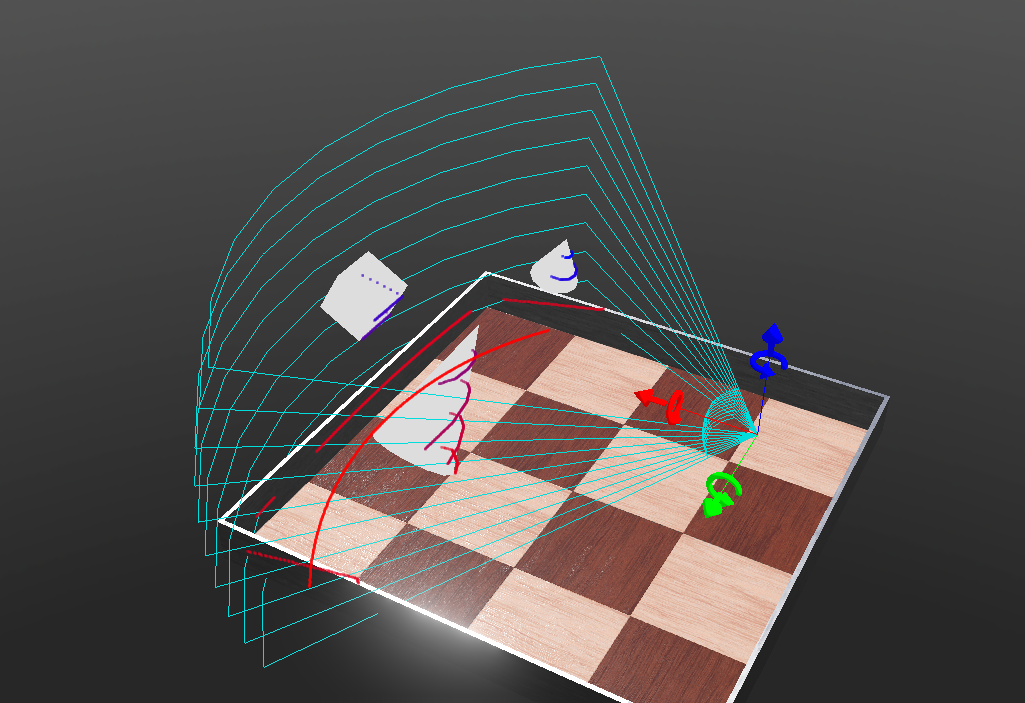
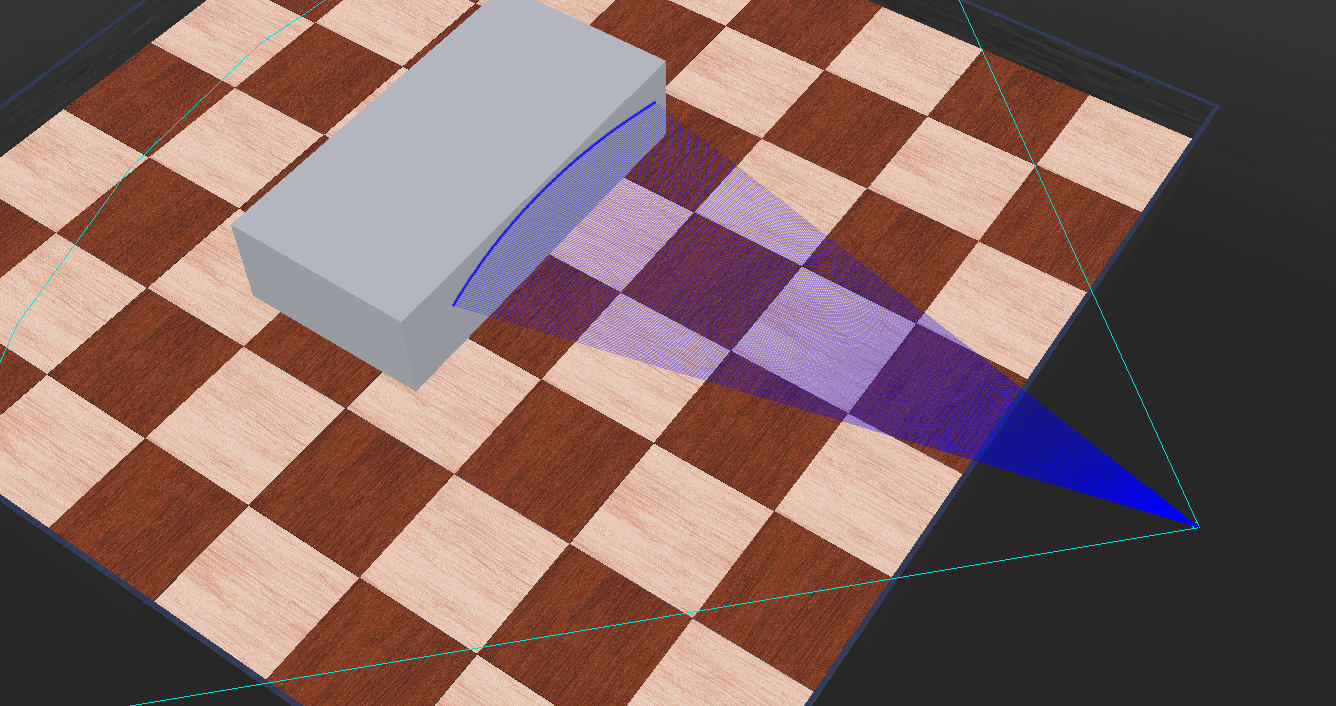
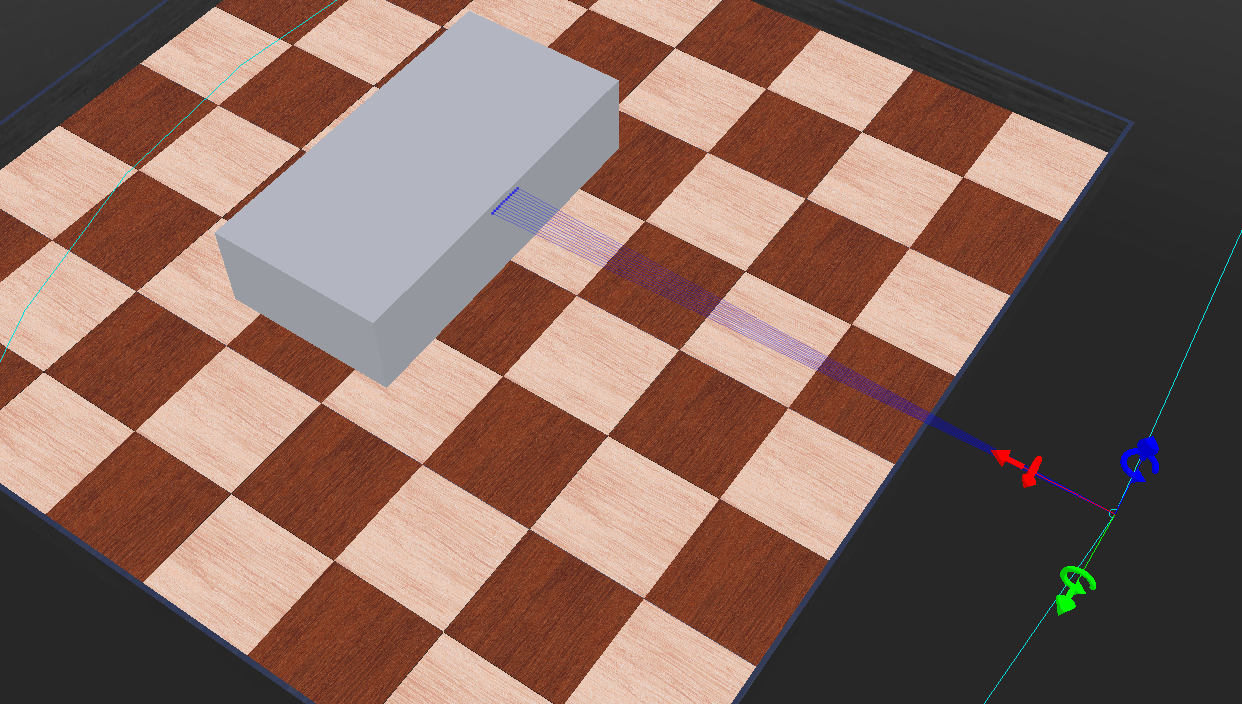
Follow up to this topic : I'm having issues working with cylindrical lidar, so I've gave the planar a try, and what a ride is it ! The data returned is actually wrong, as shown by this example, the distance are always 1.29, which correspond to the distance of the closest points, but not for the other ! Moreover, the whole object is not covered, left and right extremities don't seems to be "seen" by the lidar
Changing parameters like min/max distance etc didn't change anything
I'm running Webots on the master as today, 045000f6f723f93a57e34434dac05ff74a745013 and develop acbab4ca686d9b4b5cadc7aa2a4852bc815c40b0
Debian 11, up to date But I've no GPU, so either it's intel HD doing the job, or the CPU, idk. That could explain bad result...
What are the results on your end ?
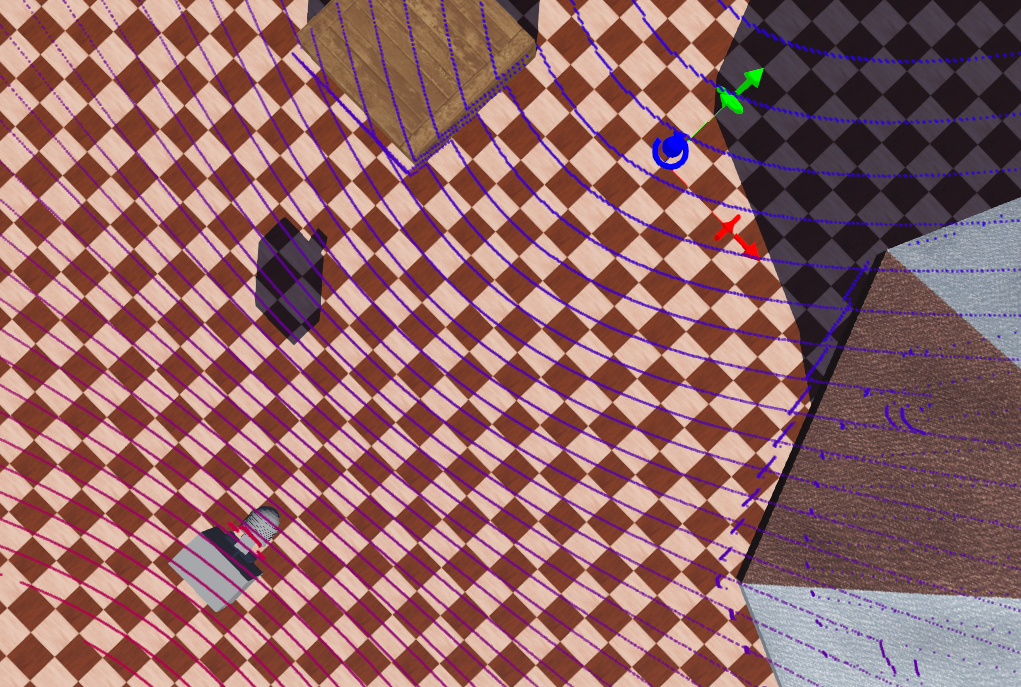
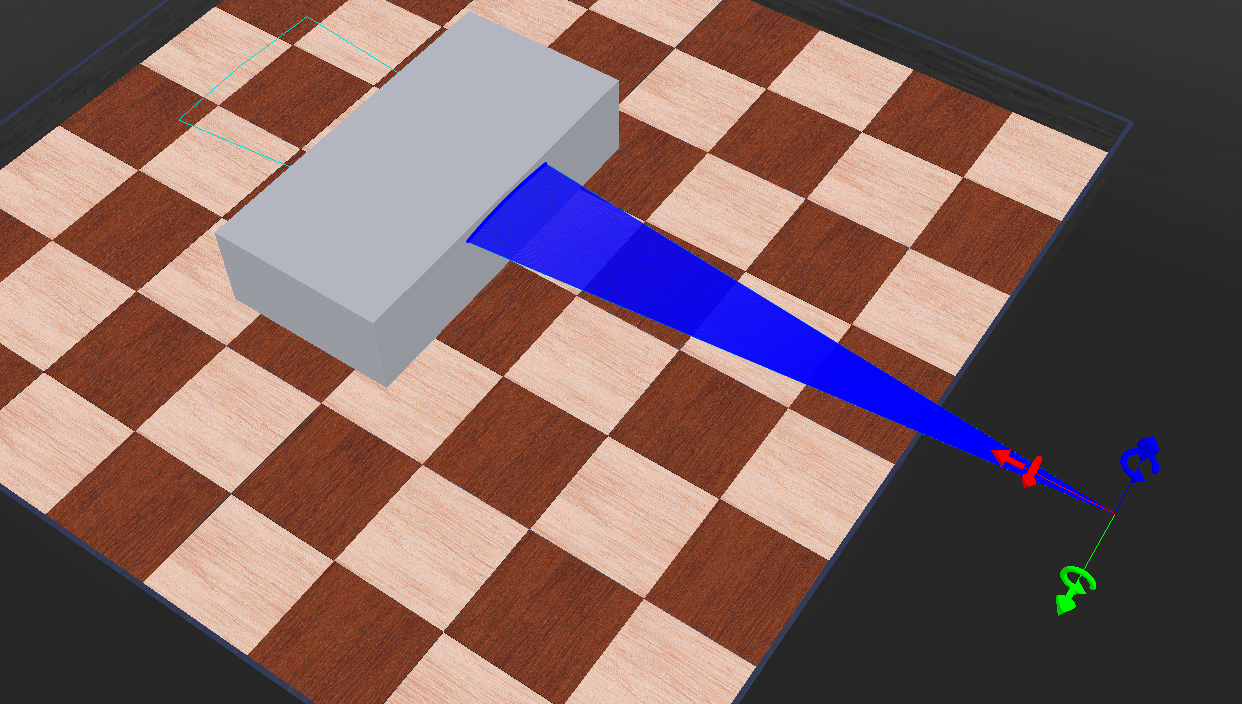
Another fun fact : when increasing the fov, the number of point reduce !
if fov is PI, not point are displayed.
if fov is near PI, (eg 3), then some points remains, as shown here :
 That is strange !
That is strange !
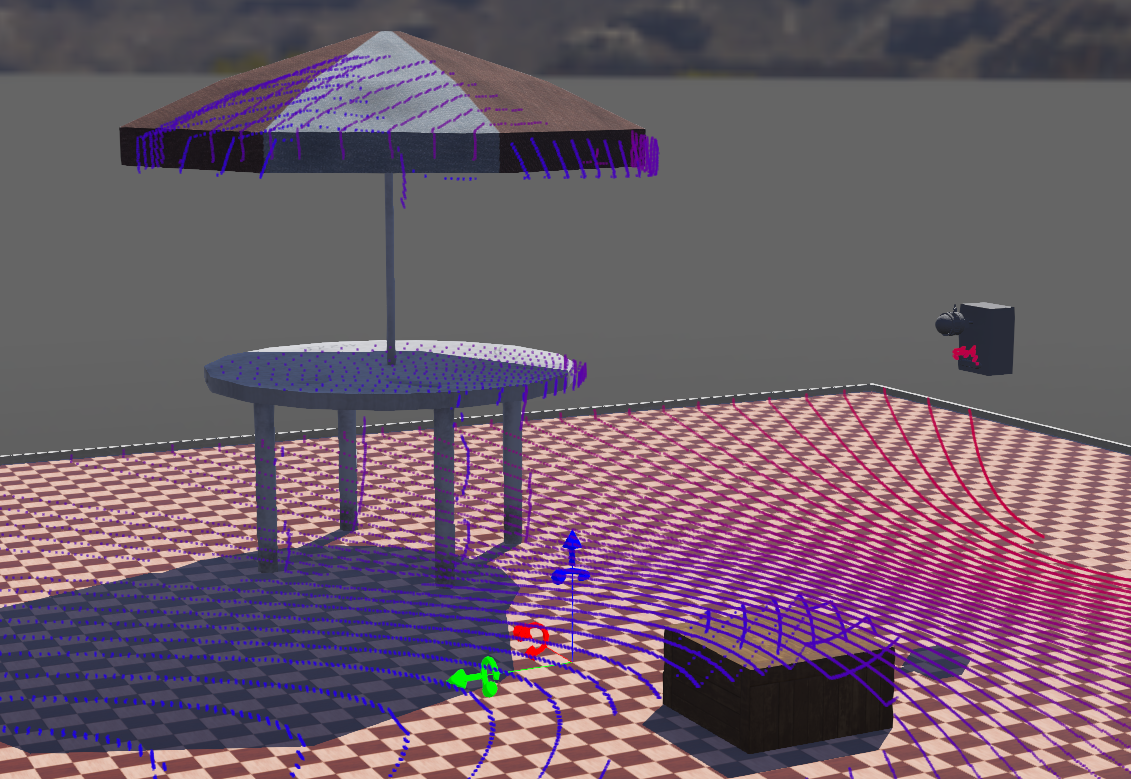
And another crazy fact :
Same world, but set fov to 0.2 you get
 but let the simulation run, and change on the fly the value to something bigger (eg 1.0), and the number of point decrease as shown here :
but let the simulation run, and change on the fly the value to something bigger (eg 1.0), and the number of point decrease as shown here :
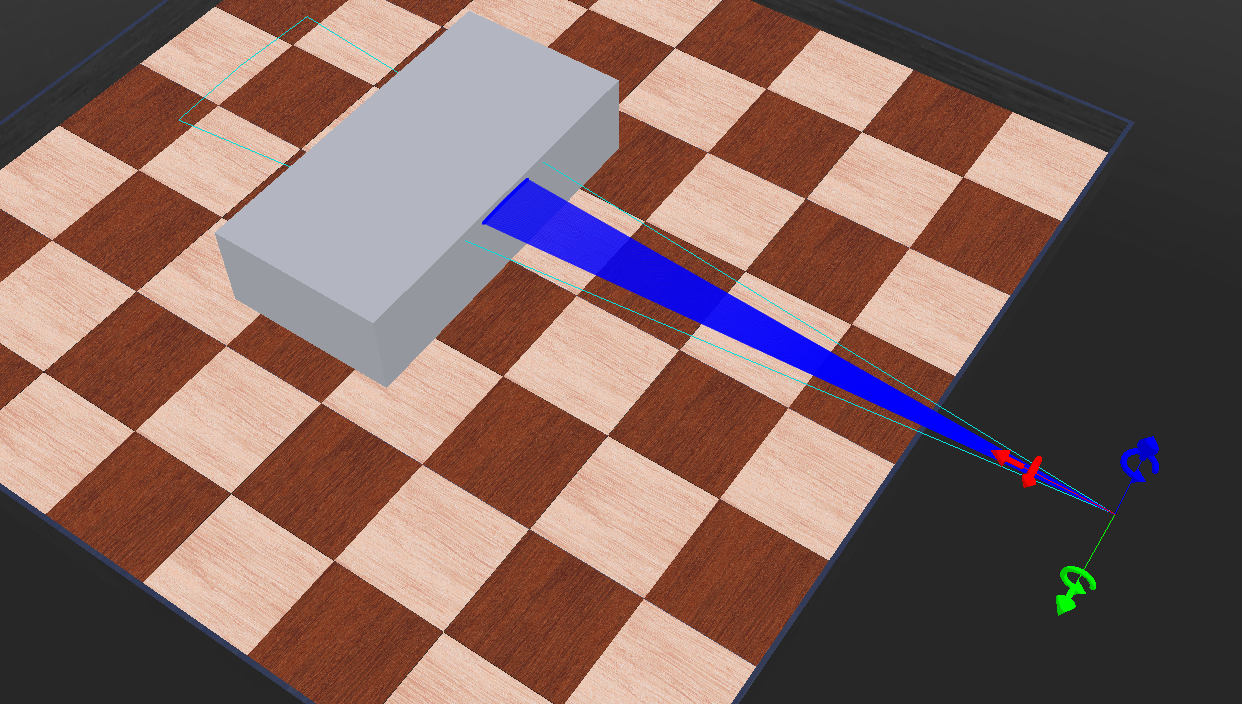
note the "Ray path" representation don't change, that also not correct...
Unfortunately I cannot give much input on that anymore. But this version from Oct-2022 worked great in combination with the current Webots version at that time. The simulated Lidar and Stereo behaved as expected.
What is the link to the issue ? Was the object actually incorrectly generated ? Because from what I see in your link, I don't understand the consequence on the Lidar