webots
 webots copied to clipboard
webots copied to clipboard
Published
20 hours ago •
 cyberbotics
cyberbotics
staticFriction for HingleJoint doesn't work
Describe the Bug A clear and concise description of what the bug is.
Steps to Reproduce
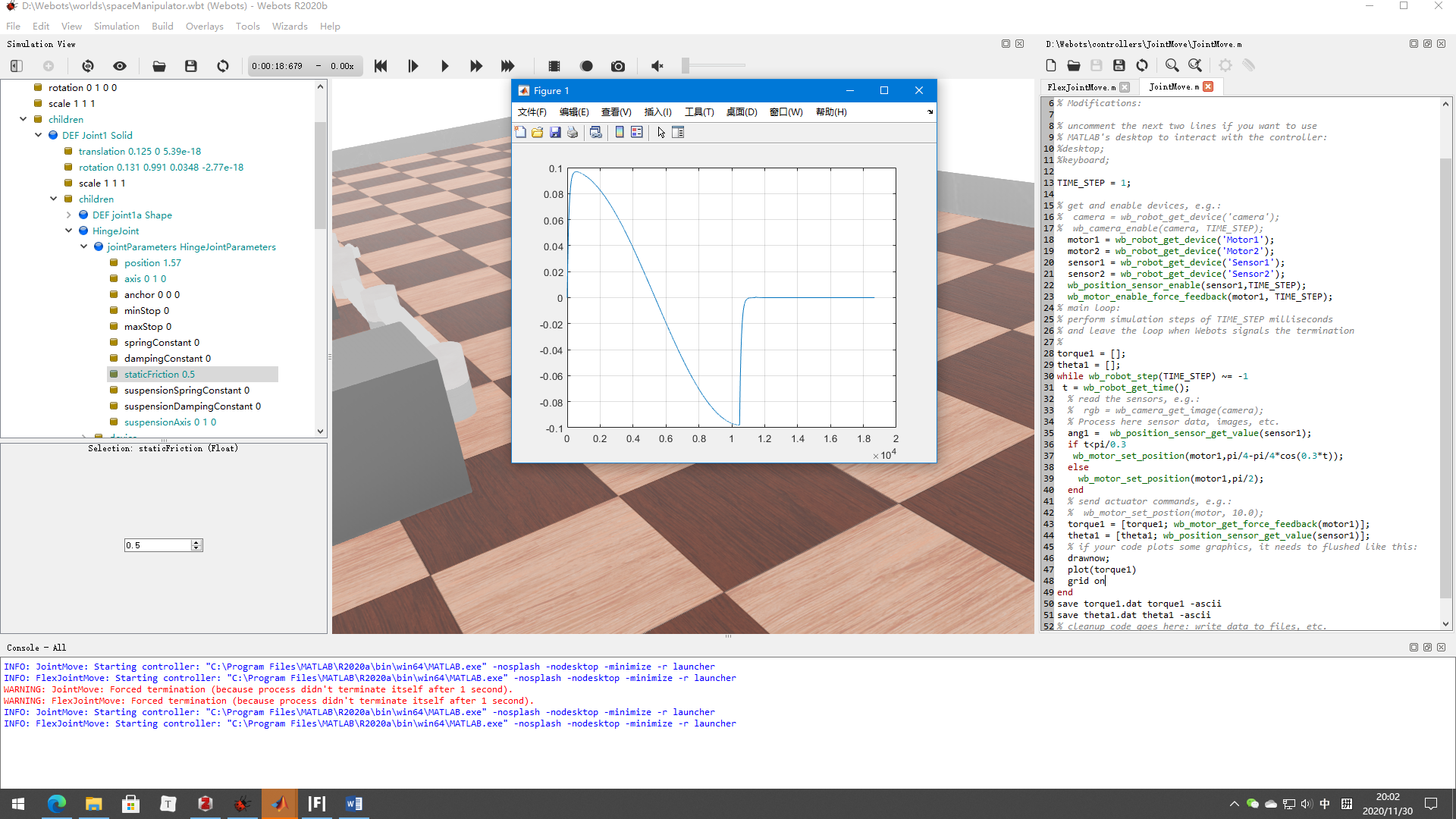
- When conducting simulation of manipulators, different "staticFriction" values of a HingleJoint lead to the same motor torques.
- As shown in the screenshot, staticFriction is set to be 0.5, but the max value of the motor torques is smaller than 0.1.
Expected behavior Fix it.
Screenshots
System
- Operating System: Windows 10
- Graphics Card: NVIDIA GeForce 1060 3 GB
Additional context no
I don't think so. Did you try the latest version of Webots to see if the bug is still there?