My question about MRG
Hello, Charles
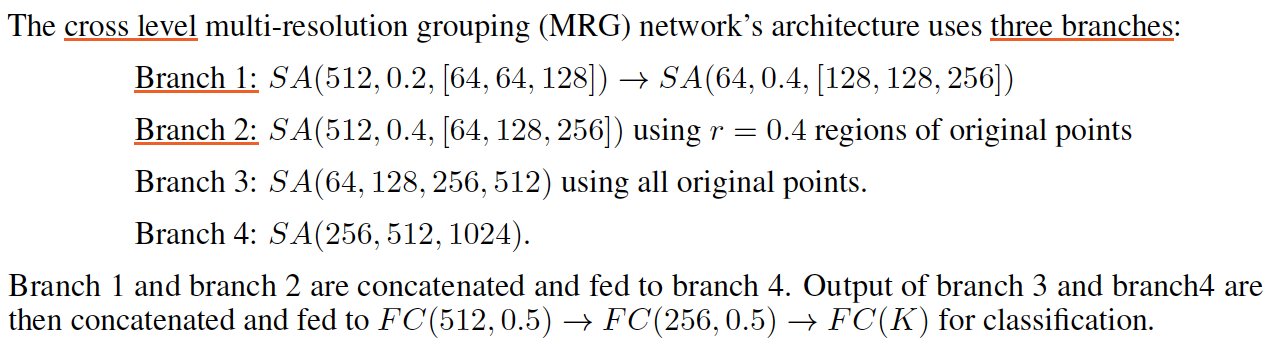
Since you didn't provide the code about MRG, I refer to supplement of PointNet++ about the Network Architectures of MRG to have a deeper understanding. But I still have some question about it.
1.In my opinion, Branch 1 is equal to the left vector in the main paper and Branch 2 is equal to the right vector. And I think the out of Branch4 is B×1×1024. I am not sure it's right; and how to set the weight of vector1 and vector2 and represent them in the code?
2.I don't know what the meaning of Branch3's parameter is, ( SA(64, 128, 256, 512) , especially the 64 ) can you explain it in detail? How to concat Branch3 and Branch4 with different dims?
3.Last,could you please provide the code of MRG? Thanks a lot~
Hi @WuzhaoLee Recently, I also works on this problem.
I think the intermediate feature might be as follows: Assuming the input is Nx3 Branch1: Nx3 -> 512x128 -> 64x256 Branch2: Nx3 -> 512x256 Concat Branch1 and Branch2: 576x256 Branch4: 1x256 -> 1x1024 Branch3: Nx3 -> 1x512 Concat Branch3 & Branch4: 1x 1536 FC: 1536 -> 512 -> 256 -> K
Hi @WuzhaoLee Recently, I also works on this problem.
I think the intermediate feature might be as follows: Assuming the input is Nx3 Branch1: Nx3 -> 512x128 -> 64x256 Branch2: Nx3 -> 512x256 Concat Branch1 and Branch2: 576x256 Branch4: 1x256 -> 1x1024 Branch3: Nx3 -> 1x512 Concat Branch3 & Branch4: 1x 1536 FC: 1536 -> 512 -> 256 -> K
I try to give the code as layumi said:
import torch.nn as nn
import torch.nn.functional as F
from pointnet_util import PointNetSetAbstraction
class get_model(nn.Module):
def __init__(self,num_class,normal_channel=True):
super(get_model, self).__init__()
in_channel = 9 if normal_channel else 3
self.normal_channel = normal_channel
# 512 = points sampled in farthest point sampling. Points number after FPS.
# 0.2 = search radius in local region. After FPS, the SA need to group points. Points within the radius range will be regarded as one group.
# 32 = how many points in each local region
# [64,64,128] = output size for MLP on each point
# 3 = 3-dim coordinates
self.sa1 = PointNetSetAbstraction(npoint=512, radius=0.2, nsample=32, in_channel=in_channel, mlp=[64, 64, 128], group_all=False)
self.sa1_1 = PointNetSetAbstraction(npoint=64, radius=0.4, nsample=32, in_channel=128 + 3, mlp=[128, 128, 256], group_all=False)
self.sa2 = PointNetSetAbstraction(npoint=512, radius=0.4, nsample=64, in_channel=in_channel, mlp=[64, 128, 256], group_all=False)
self.sa3 = PointNetSetAbstraction(npoint=None, radius=None, nsample=None, in_channel= in_channel, mlp=[64, 128, 256, 512], group_all=True)
self.sa4 = PointNetSetAbstraction(npoint=None, radius=None, nsample=None, in_channel=256 + 3, mlp=[256, 512, 1024], group_all=True)
# fc1 input:1024
self.fc1 = nn.Linear(1536, 512)
self.bn1 = nn.BatchNorm1d(512)
self.drop1 = nn.Dropout(0.5)
# fc2 input:512
self.fc2 = nn.Linear(512, 256)
self.bn2 = nn.BatchNorm1d(256)
self.drop2 = nn.Dropout(0.5)
# fc3 input:256
self.fc3 = nn.Linear(256, num_class)
def forward(self, xyz):
B, _, _ = xyz.shape# xyz:[B, 6, 1024]
if self.normal_channel:
norm = xyz[:, 3:, :]#[B, 3, 1024]
xyz = xyz[:, :3, :]#xyz:[B, 3, 1024]
else:
norm = None
l1_xyz, l1_points = self.sa1(xyz, norm)#l1_xyz:[B, 3, 512], l1_points:[B, 128, 512]
l1_1xyz, l1_1points = self.sa1_1(l1_xyz, l1_points)#l1_1xyz:[B, 3, 64], l1_points:[B, 256, 64]
l2_xyz, l2_points = self.sa2(xyz, norm)
l3_xyz, l3_points = self.sa3(xyz, norm
l12_xyz = torch.cat([l1_1xyz, l2_xyz], 2)#[B, 3, 576]
l12_points = torch.cat([l1_1points, l2_points], 2)#[B, 256, 576]
l4_xyz, l4_points = self.sa4(l12_xyz, l12_points)#l4_xyz:[B, 3, 1], l4_points:[B, 1024, 1]
l34_points = torch.cat([l3_points, l4_points], 1)#[B, 1536, 1]
x = l34_points.view(B, 1536)
x = self.drop1(F.relu(self.bn1(self.fc1(x))))
x = self.drop2(F.relu(self.bn2(self.fc2(x))))
x = self.fc3(x)
x = F.log_softmax(x, -1)
return x, l3_points
class get_loss(nn.Module):
def __init__(self):
super(get_loss, self).__init__()
def forward(self, pred, target, trans_feat):
total_loss = F.nll_loss(pred, target)
return total_loss
if __name__ == '__main__':
import torch
model = get_model(13)
xyz = torch.rand(6, 9, 2048)
x, l3_points = (model(xyz))
print(x.shape)
Can anyone give the MRG code of semantic segmentation?