Timestamps for camera data? Right camera projection?
Thank you for making the velodyne and SICK timestamps available, but do you think you might make the camera timestamps available too? In the original KITTI Tracking & Object Benchmarks, I observed there's about a 10ms difference between velo and camera (which is very nice!). The timestamps would perhaps be a bit more relevant for the side (fisheye) cameras in KITTI-360, especially since it looks like the intention is to use lidar labels for those cameras.
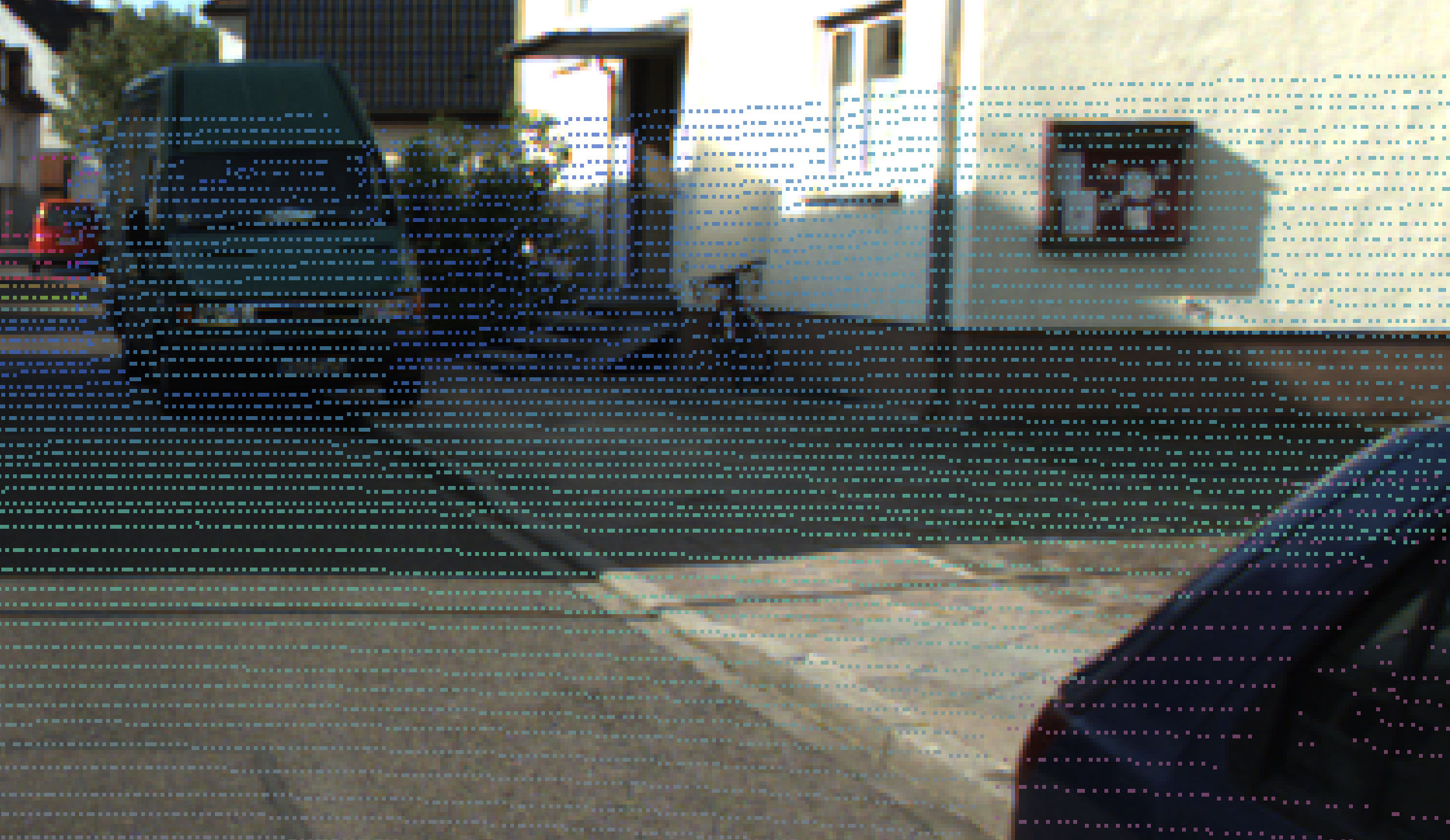
Also, when I draw the lidar points onto the right camera, I notice a bit of shift that looks perhaps due to lag rather than calibration:
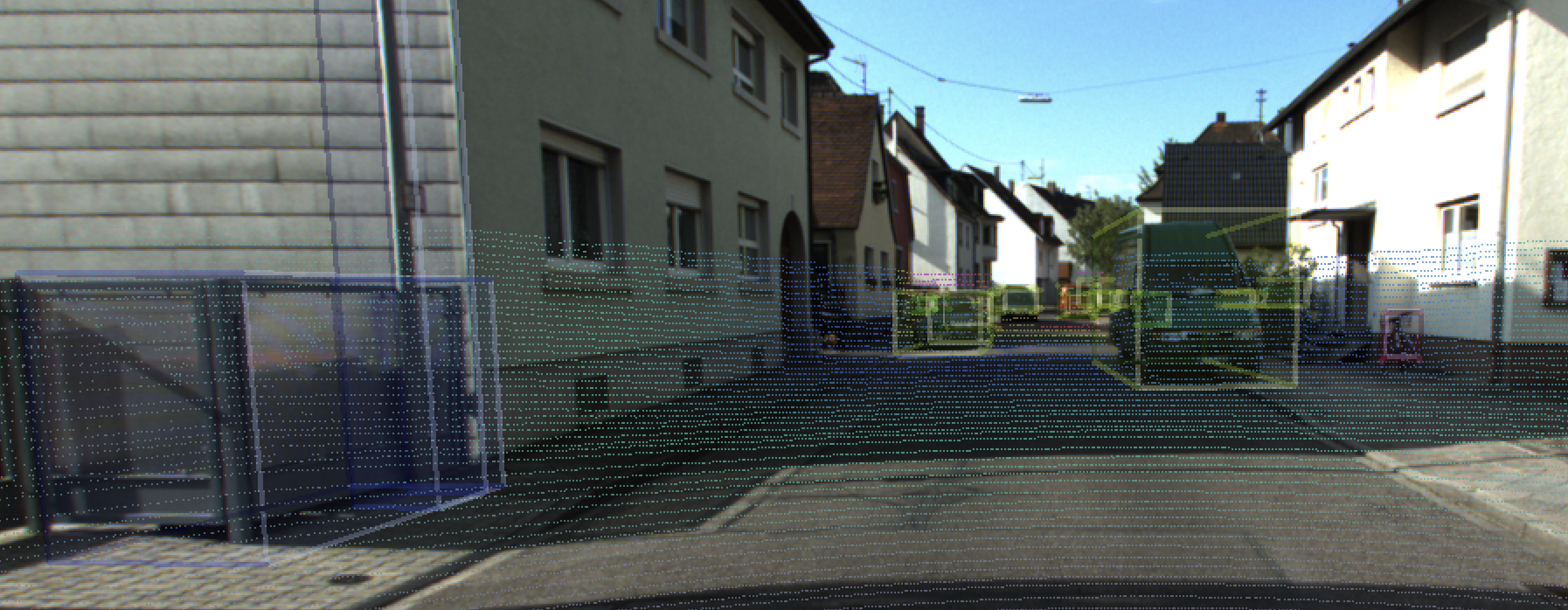
Here's the same point cloud plotted on the left camera-- the van in the distance is very tight:
Hi @pwais , we have released the timestamps of all cameras. Please check the latest download scripts for that.
Thanks for pointing out the shift on the right camera. I am not sure what is the cause and will check it out. The time difference between the left and right should be very small (<0.1ms).
Thank you for the timestamps @yiyiliao !
I did some more plotting with the right camera and while I can't get a good alignment, I'm a bit confused about the provided calibration data. Is it best to:
(1) use the extrinsics for the right camera (image_01 in calib_cam_to_pose.txt) plus the intrinsics (P_rect_01 in perspective.txt) ?
(2) use extrinsic for the left camera to move to left camera frame, then use R_01 and T_01 to in perspective to move to right camera frame, then use P_rect_01 as intrinsics?
(3) something else?
I poked around in this repo but I don't think I saw any example using the code for the right camera ...
I think there's some subtle confusion between the projective matrix P and intrinsic matrix K ... in the original KITTI datasets (e.g. Tracking & Object benchmarks), only P was provided (as in P = K[R|T]). In the case of KITTI-360, the code appears to call the projective matrix K yet the docs call it a "perspective intrinsic" so it's a little confusing. Moreover, if the data in perspective.txt for the right camera is indeed P = K[R|T], it appears undocumented as to what the transform [R|T] is (is it from the ego frame? the left camera? something else? is it to the rectified or raw right frame ..?)
It might help to have more precise documentation of perspective.txt.