Model of internal controller
Hi! I'm trying to approximate the internal controller model of the Ur10 to use it in Simulation (approximate torques from position deviations). I need to approximate a similar model to achieve similar behaviour especially in contact richt scenarios. Are there any model approximations available that you know of? I recorded some trajectories and could not yet make total sense of them, but I noticed something:
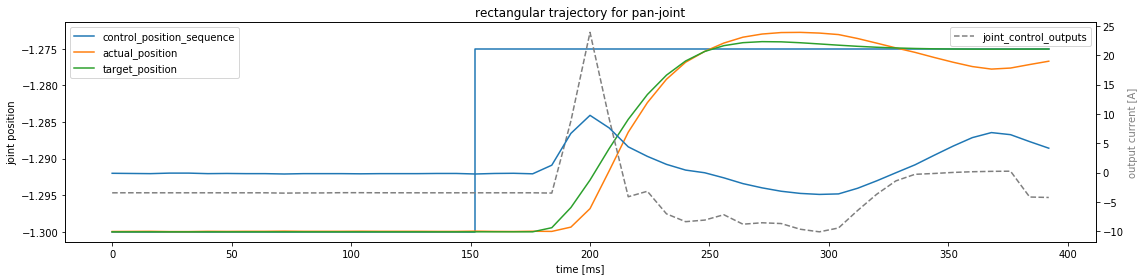
the target_q does not correspond to the control sequence I send to the controller. There seems to be some kind of smoothening happening. I assume that's the smoothening that is mentioned in the urscript documentation about servoj(). Does anyone know the algorithm that is used in this smoothening function? (see plot below)
image
Furthermore, any help regarding a methodology to identify the behaviour of the internal controller is highly appreciated.
I don't feel I can answer your question completely. My first question would be: Which interface did you use for commanding and for creating the plots?
This issue has been closed due to inactivity. Feel free to comment or reopen if this is still relevant.