SceneGrasp
 SceneGrasp copied to clipboard
SceneGrasp copied to clipboard
[IROS 2023] Real-time Simultaneous Multi-Object 3D Shape Reconstruction, 6DoF Pose Estimation and Dense Grasp Prediction
SceneGrasp
Real-time Simultaneous Multi-Object 3D Shape Reconstruction, 6DoF Pose Estimation and Dense Grasp Prediction
[Project Page] [ArXiv]
Shubham Agrawal, Nikhil Chavan-Dafle,
Isaac Kasahara, Selim Engin,
Jinwook Huh, Volkan Isler
Samsung AI Center, New York

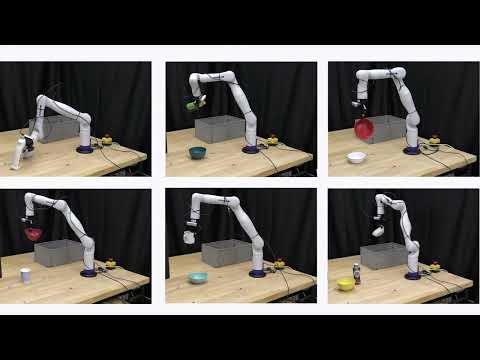

Table of contents:
- Setup environment
- Inference
- Training
- Citation
Setup environment
Install the python dependencies
conda create --prefix ./pyvenv python=3.8
conda activate ./pyvenv
pip install -r requirements.txt
pip install git+https://github.com/facebookresearch/pytorch3d.git@stable
Setup the environment by running following commands from the project root:
export PYTHONPATH=${PYTHONPATH}:${PWD}
WANDB_MODE="disabled"
Optionally, to enable html gif visualizations, install gifsicle.
Inference Demo
Download pre-trained checkpoints and unzip them at the project root. Run demo using following script:
python scripts/demo.py
This script loads the pretrained checkpoints and shows the results on a small-subset of the NOCS-Real-Test set. For every input, it first shows the predicted shapes and then it shows the predicted grasps, as shown below.

Please refer to the SceneGraspModel class for running on your own data (RGB, Depth, camera_K).
Training
There are two major steps for training this:
- Data generation and training of scale-shape-grasp-auto-encoder. See instructions here.
- Data generation and training of SceneGraspNet. See instructions here.
Acknowledgement
SceneGraspNet code is adapted from Centersnap and object-deformnet implementations. We sincerely thanks the authors for providing their implementations.
Citation
@inproceedings{
agrawal2023realtime,
title={Real-time Simultaneous Multi-Object 3D Shape Reconstruction, 6DoF Pose Estimation and Dense Grasp Prediction},
author={Shubham Agrawal and Nikhil Chavan-Dafle and Isaac Kasahara and Selim Engin and Jinwook Huh and Volkan Isler},
booktitle={{IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}},
year={2023}
}
Metadata
Owner
Metadata
[IROS 2023] Real-time Simultaneous Multi-Object 3D Shape Reconstruction, 6DoF Pose Estimation and Dense Grasp Prediction