drake
 drake copied to clipboard
drake copied to clipboard
InverseDynamicsController does not allow for output_projection_matrix which results in a not desired behavior
I noticed that IDC has an incorrect actuation mapping when used in the following plant:
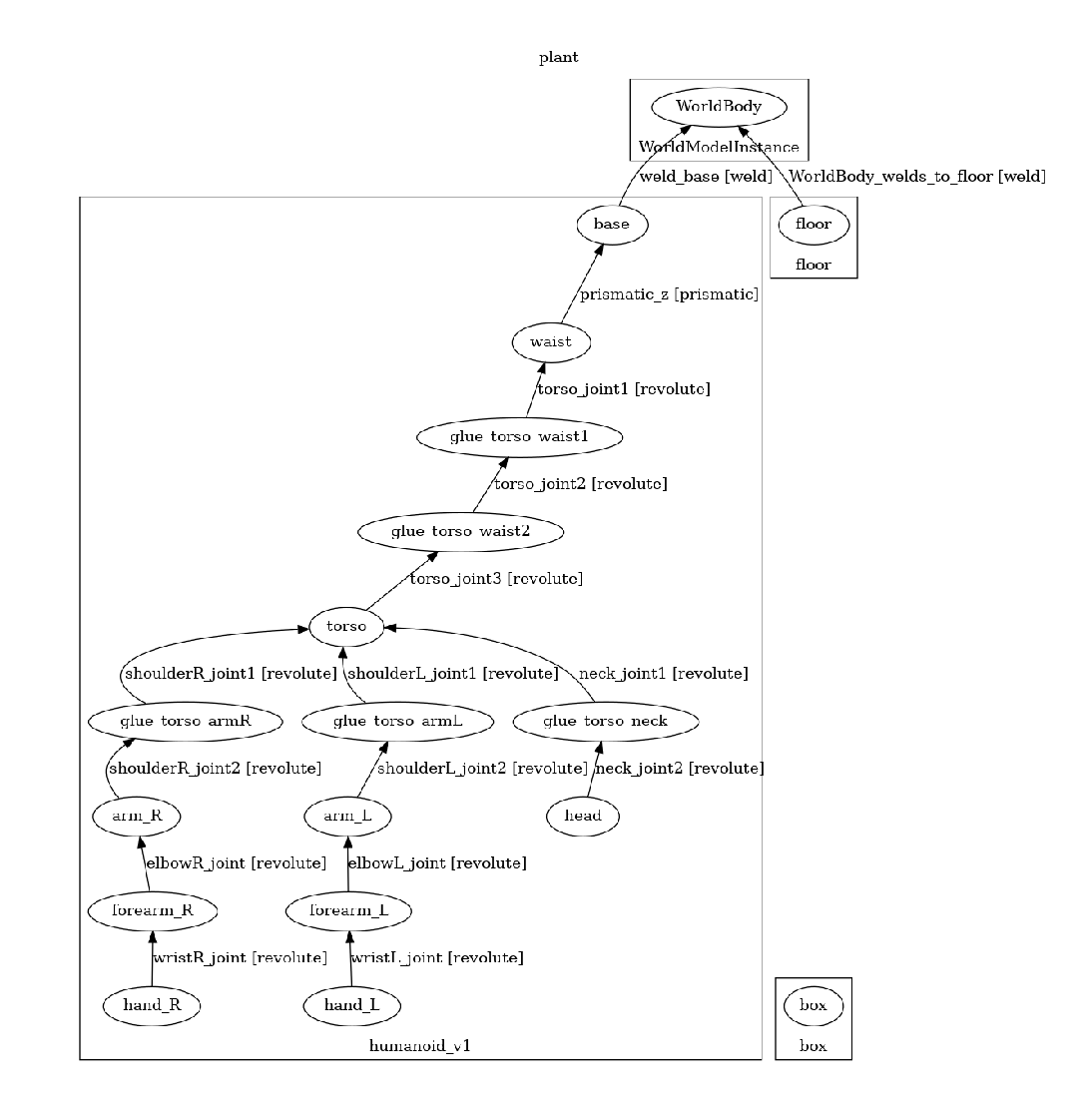
From looking at the code, I believe the output needs to be multiplied by plant.MakeActuationMatrix() by default or at least allow the user to add the actuation_matrix in the arguments of the IDC in a similar way that is done for the PID controller (output_projection_matrix). I think the former is a better option because it reduces the overhead for the user.
For context, connecting the IDC straight to the plant results in a not desired behavior:
and multiplying the output of the IDC by the actuation_matrix results in the desired behavior:
Relates fairly closely to #16908 (this may be a more concrete proposal to address that issue). Relates tangentially to #12270 (also an issue of the layout of q / v vectors)
Assigned to @siyuanfeng-tri as the original author of InverseDynamicsController.