[MC&VTOL] Faster blind landing (position loss failsafe)
Describe problem solved by this pull request
The global position loss failsafe is IMO one of the most poorly handled failsafes, especially for MC and VTOLs. If you fly in high wind conditions the possible position drift is currently almost without bounds. And as without a global position you most likely don't have a functioning geocage anymore, this is really problematic.
This PR reduces the potential drifts by descending faster.
Describe your solution
Use MPC_Z_VEL_MAX_DN to set the descent speed in DESCEND mode instead of MPC_LAND_SPEED. If there is a valid _dist_to_bottom measurement use this to slow down the landing before hitting the ground.
If there is no rangefinder, the vehicle will hit the ground with MPC_Z_VEL_MAX_DN, which is IMO still much better than having enormous drifts.
Test data / coverage
SITL on a modified standard_vtol model that includes a lidar sensor: standard_vtol.zip (following https://docs.px4.io/v1.12/en/sensor/rangefinders.html#simulation)
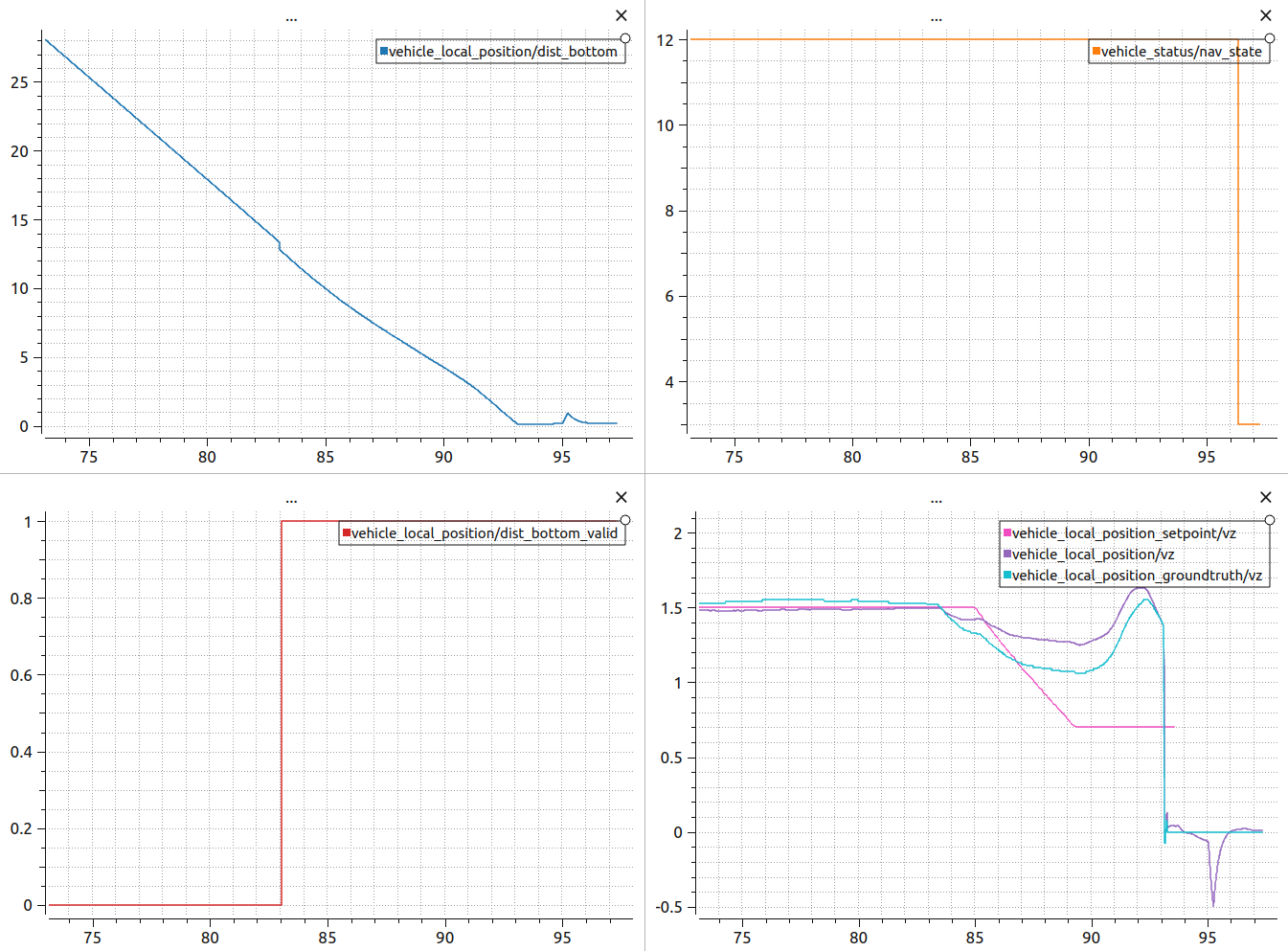
Log flying a mission, disabling GPS via failure gps off : https://logs.px4.io/plot_app?log=6e024336-d596-40eb-9e95-42bbafd2d625
In the following screenshot, you can see how the down speed reduces from MPC_Z_VEL_MAX_DN (1.5m/s) to MPC_LAND_SPEED (0.7m/s) when using the lidar.
Additional context
PR following a slack discussion: https://px4.slack.com/archives/C0V533X4N/p1653709401725759
Couldn’t agree more on the importance of lack of global position handling. Things like this are crucial to help the safety case. 👍👍
Depends on how precisely you want this documented. Currently on https://docs.px4.io/main/en/config/safety.html#position-gps-loss-failsafe the docs just say "Switch to Land mode". Which is not fully incorrect as you can consider Descend mode as some sort of landing mode, in which case no change in docs is really needed.
However, in general I couldn't find Descend Mode anywhere in the docs, which might be good to change. But for an average user it might get too detailed if you expose the fallback mode for landing.
However, in general I couldn't find Descend Mode anywhere in the docs, which might be good to change. But for an average user it might get too detailed if you expose the fallback mode for landing.
Yes, I've never heard of Descend mode. It would be good to document, but only if the name propagated everywhere - i.e. no point if the failsafe text still says "Land mode".
To me it really depends on whether there is user configuration that needs to be covered here. If so we should document the mode. If the situation is invisible to the user - they just see it landing with "Land mode" displayed in the GCS there doesn't seem much point in having anything extra in docs.
To my knowledge there is no situation in which a user would actively want to go into Descend mode. It's basically a stripped down land mode for the case where you have no position control available and therefore can't do a normal landing. So no user config required.
On Thu, 8 Sep 2022, 04:40 Hamish Willee, @.***> wrote:
However, in general I couldn't find Descend Mode anywhere in the docs, which might be good to change. But for an average user it might get too detailed if you expose the fallback mode for landing.
Yes, I've never heard of Descend mode. It would be good to document, but only if the name propagated everywhere - i.e. no point if the failsafe text still says "Land mode".
To me it really depends on whether there is user configuration that needs to be covered here. If so we should document the mode.
— Reply to this email directly, view it on GitHub https://github.com/PX4/PX4-Autopilot/pull/19811#issuecomment-1240149275, or unsubscribe https://github.com/notifications/unsubscribe-auth/ALPZHBIQYFZFE2WIICH4LADV5FG2FANCNFSM5Y6NRP3A . You are receiving this because you authored the thread.Message ID: @.***>