vision4leg
 vision4leg copied to clipboard
vision4leg copied to clipboard
Toolkit for vision-guided quadrupedal locomotion research
When I finish training Epochs, it prompts "Destroy EGL OpenGL windows" , Is it caused by the version of OpenGL?
How to make Realsense get a high quality depth image like the Repository does?如何使相机获取像项目中一样的高质量深度图?

Question1:The paper’s depth image are of high quality, and the boundaries between objects and ground and between objects and objects are relatively clear, as follows: 问题1:论文中的深度图质量很高,物体和地面与物体与物体间边界比较清晰,如下: 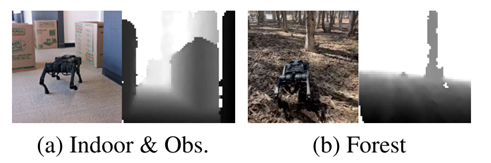  However, the...
Hi: When I used the command `python starter/ppo_locotransformer.py --config config/rl/static/locotransformer/thin-goal.json --seed 0 --log_dir log --id 0`, I encountered this error: ``` Traceback (most recent call last): File "starter/ppo_locotransformer.py", line 123,...
Hello, I am reproducing your article recently, and I have some doubts about the result, so I would like to consult you. Thank you very much if you can have...
Hi! Thank you for open-sourcing the work. I'm running the baseline script with ` python starter/ppo_nature_cnn_vision_only.py --config config/rl/static/naive_baseline/thin.json`. However, the environment keeps returning shape `65728` after setting `add_last_action_input` to False....
Hello,@Mehooz thanks for your public work,it's pretty interesting. But there is an error when I run, could you please do me a favour to have a loook? python starter/ppo_locotransformer.py --config...
Hello!@Mehooz When you deploy this algorithm, do you directly port the code to A1 upboard or do you use remote PC deployment? I would like to know how to get...
Hi! I trained the model by using the script `python starter/ppo_locotransformer.py --config config/rl/challenge/locotransformer/chair_desk.json --seed 0 --log_dir logs`, an error went on `failed to EGL with glad.` Do you know how...
Hi @Mehooz , Im a little confused why the locotransformer.py is much faster than the locotransformer_vision_only.py? Im running it on rtx4090. but the time of training 10 epochs is about...
Hello: When I ran the trained policy on the A1, I used the command `python3 a1_hardware/execute_locotransformer.py`, then I encountered this error: ``` pi@raspberrypi:~/vision4leg$ python3 a1_hardware/execute_locotransformer.py Idx: 5 UDP Initialized. Port:...