ardupilot
 ardupilot copied to clipboard
ardupilot copied to clipboard
Rover: add precision landing library to rover
This PR adds precision landing library to rover with minor changes to make the library work with the horizontal targets. Currently on rover, we only add the support for sending landing target information using a companion computer. The only modifications done in the precision landing library are related to rotation of target vector from camera frame to body frame (in camera frame z-axis point in the direction camera is facing). We do that with the help of PLND_ORIENT parameter in which we specify where is the camera mounted on vehicle's body. Currently, we add support for only down, front and back rotations, later we can add support for more orientations too. I have tested it's working with the new dock mode in rover. I'll be writing another PR to merge that mode too. This PR needs to be merged before that one. Thanks @rmackay9 and @peterbarker for all your guidance.
How about moving the library to vehicle. We will want it on plane eventually probably. Maybe something to circle back to if you have time.
@IamPete1, yes, we discussed moving it to AP_Vehicle but push this off to a future PR because it would increase the scope of the change to involve fixing the definition as well (which is currently at the vehicle level).
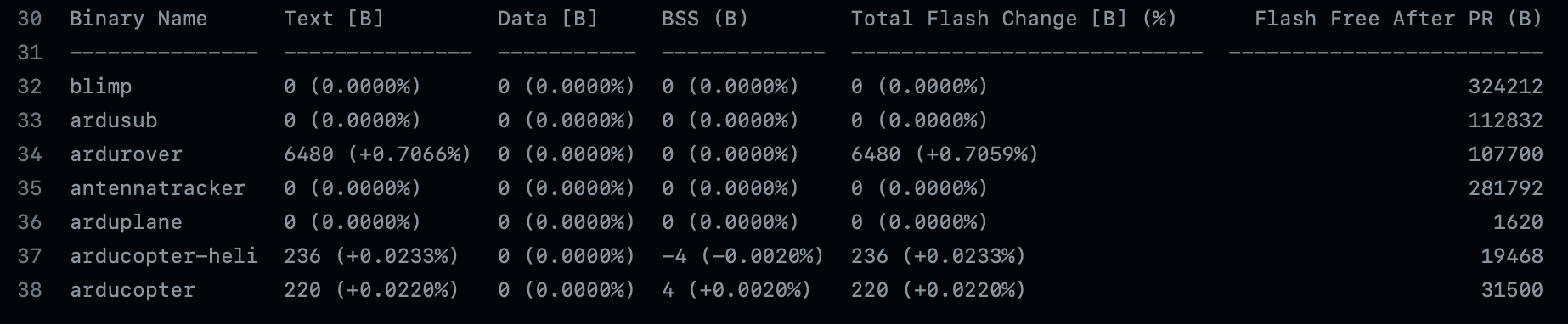
Thanks @tridge for having a look on this one. Here is a screenshot from one of the CI tests which tells there is no effect of this on plane. The changes only affect rover majorly and copter a bit.
@rishabsingh3003 could you put your approval on this if you think it's OK? Thanks again for doing the detailed review!
Merged! hope this is OK with everyone. We need to keep moving forward so if there are any remaining concerns let's handle them in follow up PRs.