Copter: unable to arm when throttle is maximized in GUIDED mode
Bug report
Issue details
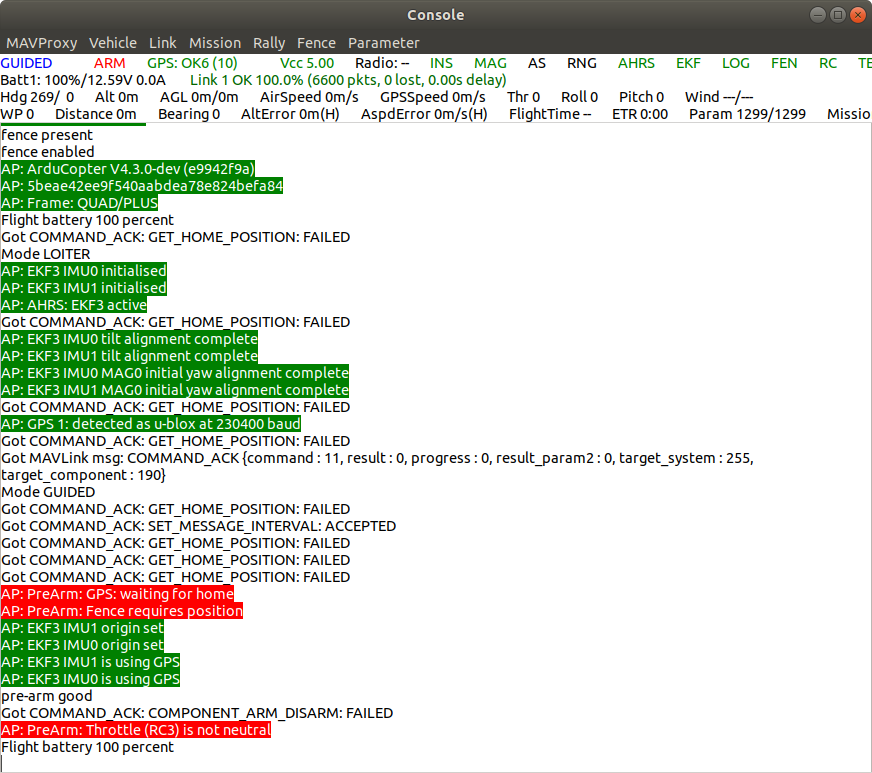
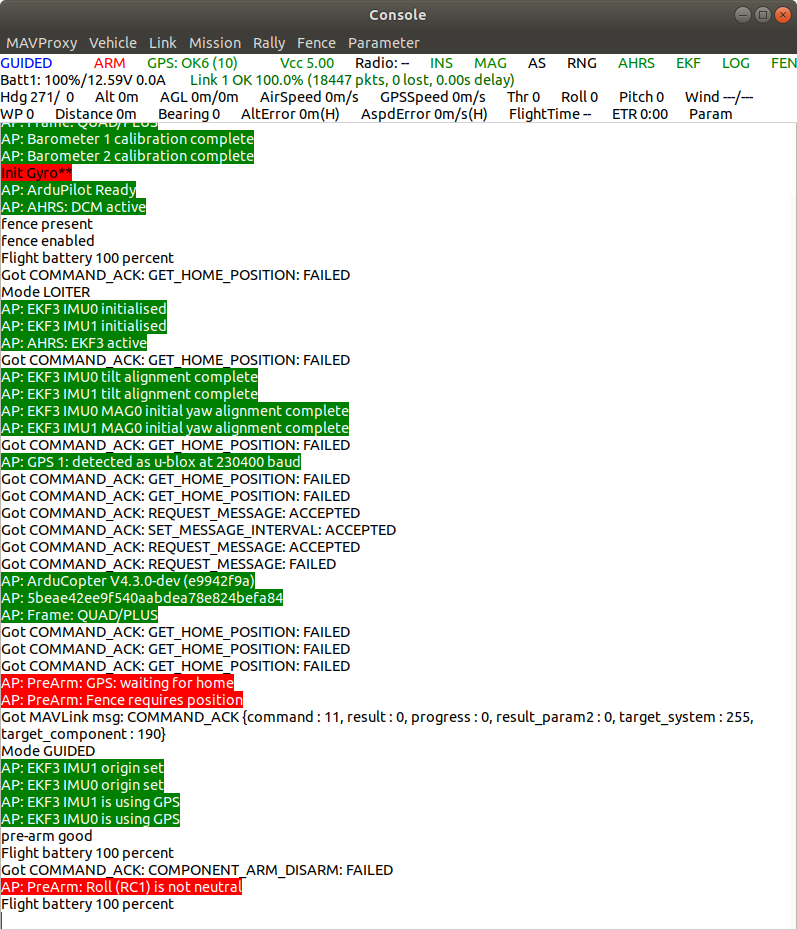
I did an ARM from a QGC in GUIDED mode with the throttle of the radio on top. I could not arm with "PreArm: Throttle (RC3) is not neutral". I expect it to ignore the radio input except for the flight mode channel. I can transition from GUIDED mode to other modes by changing the flight mode channel.
I will change the flight mode to not see elevator, aileron, throttle, and rudder status when the flight mode is GUIDED mode.
Version
ArduCopter V4.3.0-dev (e9942f9a)
Platform [ ] All [ ] AntennaTracker [X] Copter [ ] Plane [ ] Rover [ ] Submarine
Airframe type
QUAD COPTER
Hardware type
SITL
Logs
OTHER STICK
CHECK SOURCE
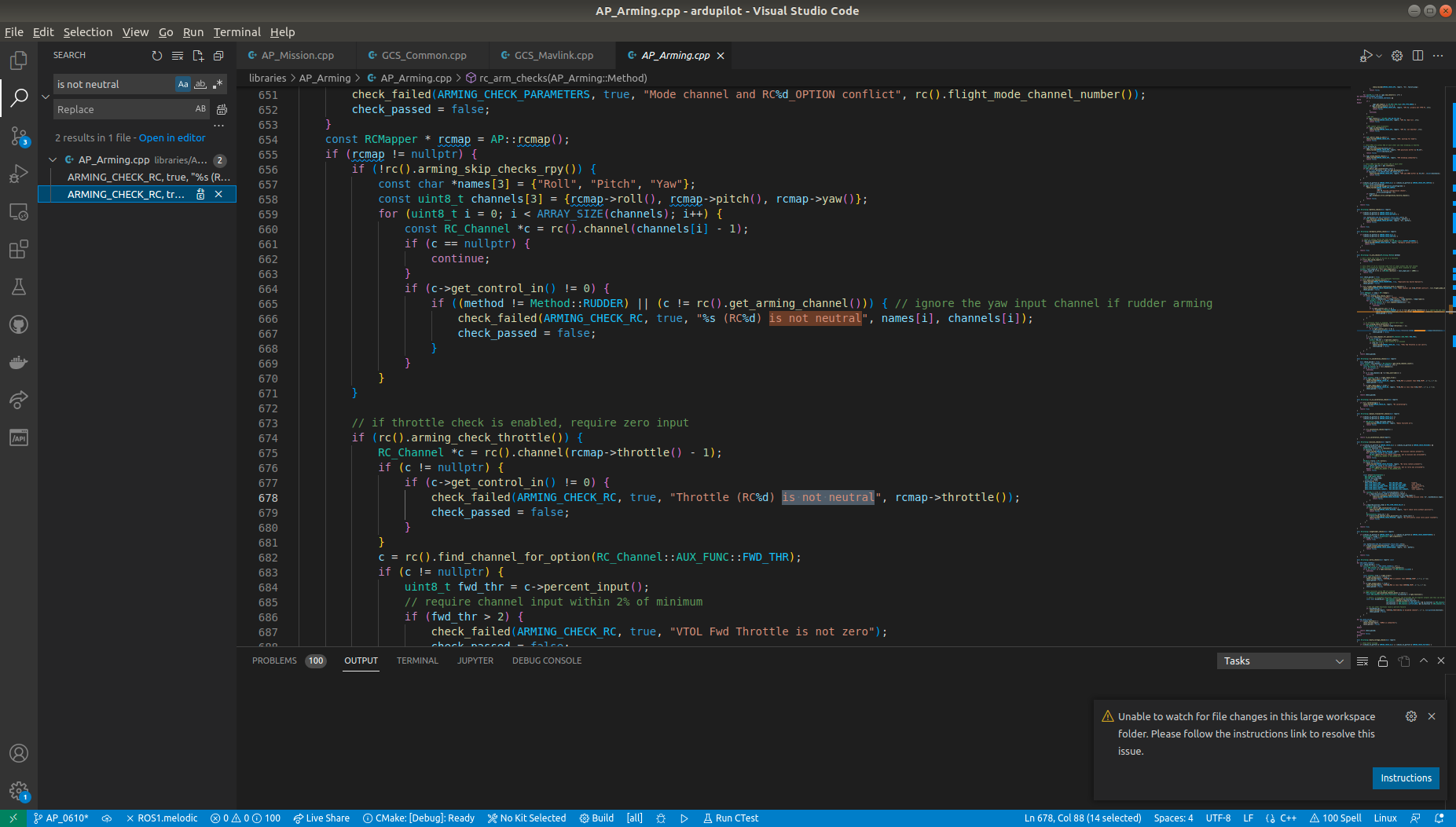
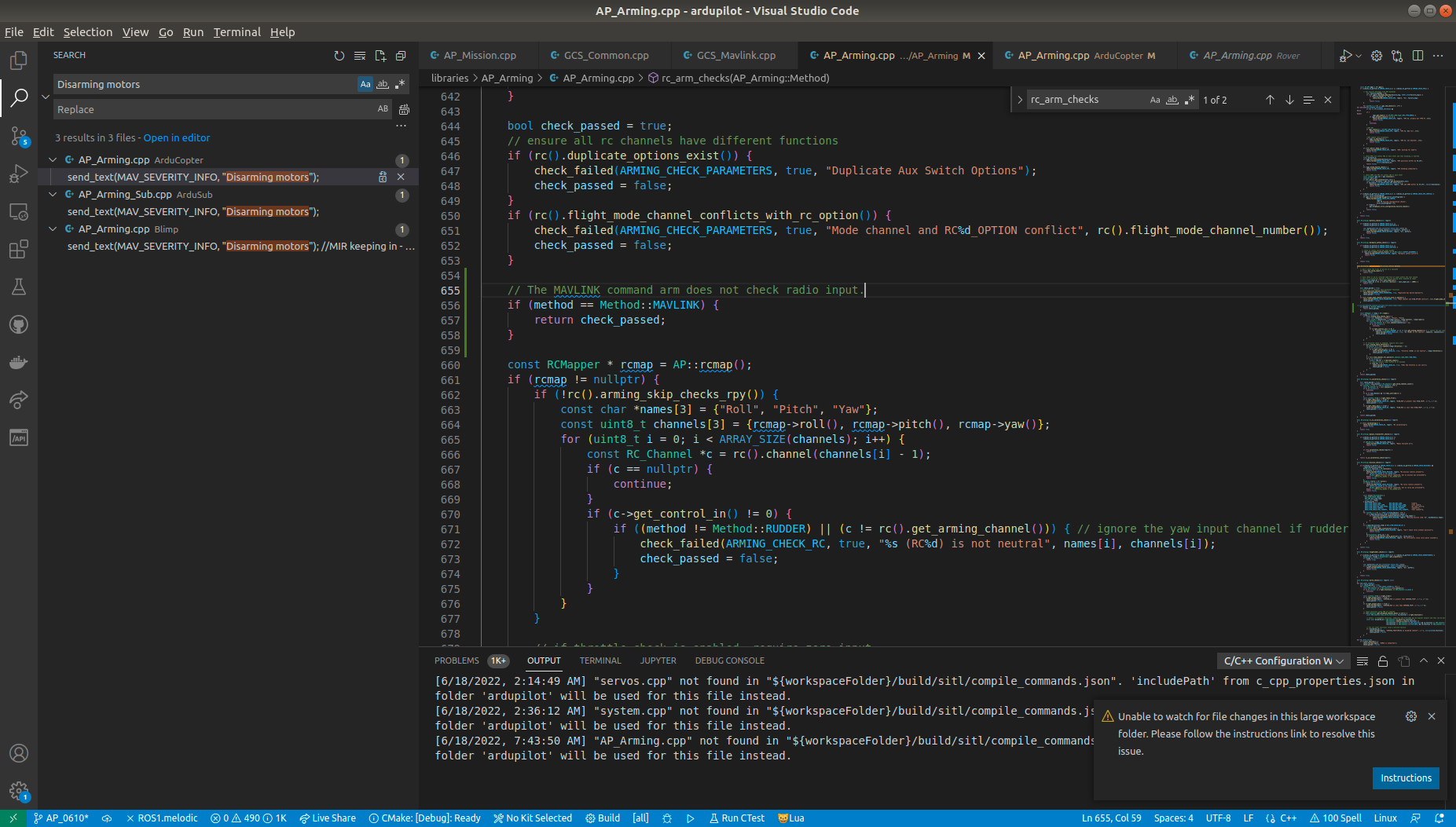
I would add a decision not to check the radio input if the arm is by MAVLINK. With this addition I could arm ignoring the propo stick.
We have a related (perhaps duplicate?) issue here https://github.com/ArduPilot/ardupilot/issues/21415