ardupilot
 ardupilot copied to clipboard
ardupilot copied to clipboard
Adding ibus telemetry support via serial to arducopter
This is my first pull request. I tried to follow the guidelines as much as possible. Sorry if i made newbie mistakes.
Dear, it seems that i'm missing something in order to let the build work correctly. I filled in my new library in the wscript, but it seems it can't resolve it. Any idea what i'm missing?
I think you don't need it in the individual vehicle wscript files just adding it in ardupilotwaf.py should be fine (with the correct capitalization ;) ).
I updated my code with all changes requested, but I messed up the commits during attempt to cleanup. What shall I do start from a fresh branch and do my changes there or is there someone who can help me to cleanup my feature branch?
On Sat, 13 Feb 2021, jverhuls wrote:
I updated my code with all changes requested, but I messed up the commits during attempt to cleanup. What shall I do start from a fresh branch and do my changes there or is there someone who can help me to cleanup my feature branch?
I can fix it up for you if you like.
On Sat, 13 Feb 2021, jverhuls wrote: I updated my code with all changes requested, but I messed up the commits during attempt to cleanup. What shall I do start from a fresh branch and do my changes there or is there someone who can help me to cleanup my feature branch? I can fix it up for you if you like.
That's very much appreciated. Is it possible to tell me how you can fix it, so I can learn?
@jverhuls The git history was basically to messy to be worth cleaning up, so I essentially just copied all of your changes into a new branch:
pbarker@bluebottle:~/rc/ardupilot(master)$ git checkout jverhuls/Ardupilot-ibus-telemetry-feature-branch
M modules/ChibiOS
Note: checking out 'jverhuls/Ardupilot-ibus-telemetry-feature-branch'.
You are in 'detached HEAD' state. You can look around, make experimental
changes and commit them, and you can discard any commits you make in this
state without impacting any branches by performing another checkout.
If you want to create a new branch to retain commits you create, you may
do so (now or later) by using -b with the checkout command again. Example:
git checkout -b <new-branch-name>
HEAD is now at 8affe3512b Merge branch 'Ardupilot-ibus-telemetry-feature-branch' of https://github.com/jverhuls/ardupilot into Ardupilot-ibus-telemetry-feature-branch
pbarker@bluebottle:~/rc/ardupilot((HEAD detached at jverhuls/Ardupilot-ibus-telemetry-feature-branch))$ git merge master
Already up to date.
pbarker@bluebottle:~/rc/ardupilot((HEAD detached at jverhuls/Ardupilot-ibus-telemetry-feature-branch))$ git diff remotes/origin/master >/tmp/some.patch
pbarker@bluebottle:~/rc/ardupilot((HEAD detached at jverhuls/Ardupilot-ibus-telemetry-feature-branch))$ git checkout -b tmp remotes/origin/master
Previous HEAD position was 8affe3512b Merge branch 'Ardupilot-ibus-telemetry-feature-branch' of https://github.com/jverhuls/ardupilot into Ardupilot-ibus-telemetry-feature-branch
Branch 'tmp' set up to track remote branch 'master' from 'origin'.
Switched to a new branch 'tmp'
pbarker@bluebottle:~/rc/ardupilot(tmp)$ patch -p1 </tmp/some.patch
patching file Tools/ardupilotwaf/ardupilotwaf.py
patching file libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
patching file libraries/AP_IBus_Telem/AP_IBus_Telem.h
patching file libraries/AP_SerialManager/AP_SerialManager.h
patching file libraries/AP_Vehicle/AP_Vehicle.cpp
patching file libraries/AP_Vehicle/AP_Vehicle.h
pbarker@bluebottle:~/rc/ardupilot(tmp)$ git add libraries/AP_IBus_Telem/AP_IBus_Telem.cpp libraries/AP_IBus_Telem/AP_IBus_Telem.h
pbarker@bluebottle:~/rc/ardupilot(tmp)$ git commit -C 23cd811bf40fdeeddb156997b09f64d4630e0b68 -a
[tmp e242e7ffeb] AP_IBus_Telem: optimize code - adding feature flag - styling
Author: Jan Verhulst <[email protected]>
Date: Sat Feb 13 08:04:01 2021 +0100
6 files changed, 342 insertions(+)
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h
pbarker@bluebottle:~/rc/ardupilot(tmp)$ git commit --amend -m "add support for IBus protocol"
[tmp fec51a0ead] add support for IBus protocol
Author: Jan Verhulst <[email protected]>
Date: Sat Feb 13 08:04:01 2021 +0100
6 files changed, 342 insertions(+)
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h
pbarker@bluebottle:~/rc/ardupilot(tmp)$ git show
commit fec51a0ead20ff4f33961d890eb75b27584e008b (HEAD -> tmp)
Author: Jan Verhulst <[email protected]>
Date: Sat Feb 13 08:04:01 2021 +0100
add support for IBus protocol
diff --git a/Tools/ardupilotwaf/ardupilotwaf.py b/Tools/ardupilotwaf/ardupilotwaf.py
index fb2d2be0be..f83eaa244f 100644
--- a/Tools/ardupilotwaf/ardupilotwaf.py
+++ b/Tools/ardupilotwaf/ardupilotwaf.py
@@ -64,6 +64,7 @@ COMMON_VEHICLE_DEPENDENT_LIBRARIES = [
'AP_Button',
'AP_ICEngine',
'AP_Frsky_Telem',
+ 'AP_IBus_Telem',
'AP_FlashStorage',
'AP_Relay',
'AP_ServoRelayEvents',
diff --git a/libraries/AP_IBus_Telem/AP_IBus_Telem.cpp b/libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
new file mode 100644
index 0000000000..e635f34383
pbarker@bluebottle:~/rc/ardupilot(tmp)$ ./Tools/gittools/git-subsystems-split
rm: cannot remove '/tmp/tmp.7ZKk8CmyeI': No such file or directory
Reseting changes in order to add files separately...
Adding and committing subsystems...
[tmp 1aca27019e] AP_IBus_Telem: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
2 files changed, 326 insertions(+)
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h
[tmp a1f6a43e7e] AP_SerialManager: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
1 file changed, 1 insertion(+)
[tmp c68b693d2b] AP_Vehicle: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
2 files changed, 14 insertions(+)
[tmp 198d28d8b1] Tools: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
1 file changed, 1 insertion(+)
pbarker@bluebottle:~/rc/ardupilot(tmp)$ git log
commit 198d28d8b1faa37adb912d720b56d38929707bc9 (HEAD -> tmp)
Author: Jan Verhulst <[email protected]>
Date: Sun Feb 14 21:52:41 2021 +1100
Tools: add support for IBus protocol
commit c68b693d2babf977200f4fb096cc023d32cf7336
Author: Jan Verhulst <[email protected]>
Date: Sun Feb 14 21:52:40 2021 +1100
AP_Vehicle: add support for IBus protocol
commit a1f6a43e7e9ceb88083b62376fed5de9b3996490
Author: Jan Verhulst <[email protected]>
Date: Sun Feb 14 21:52:40 2021 +1100
AP_SerialManager: add support for IBus protocol
commit 1aca27019ef7c7f49626ce1dc7ba61c8a7226de0
Author: Jan Verhulst <[email protected]>
Date: Sun Feb 14 21:52:40 2021 +1100
AP_IBus_Telem: add support for IBus protocol
commit 1b74058842954e7257c6475f21042be2102fe768 (origin/master, origin/HEAD, pr/ibus, master)
Author: Peter Barker <[email protected]>
Date: Wed Feb 10 12:16:43 2021 +1100
pbarker@bluebottle:~/rc/ardupilot(tmp)$ git push github tmp
Counting objects: 22, done.
Delta compression using up to 4 threads.
Compressing objects: 100% (18/18), done.
Writing objects: 100% (22/22), 6.65 KiB | 6.65 MiB/s, done.
Total 22 (delta 14), reused 6 (delta 4)
remote: Resolving deltas: 100% (14/14), completed with 9 local objects.
remote:
remote: Create a pull request for 'tmp' on GitHub by visiting:
remote: https://github.com/peterbarker/ardupilot/pull/new/tmp
remote:
To ssh://github.com/peterbarker/ardupilot.git
* [new branch] tmp -> tmp
pbarker@bluebottle:~/rc/ardupilot(tmp)$
If you're happy with that branch (https://github.com/ArduPilot/ardupilot/compare/master...peterbarker:tmp?expand=1) then I'll push it over your github branch.
@jverhuls The git history was basically to messy to be worth cleaning up, so I essentially just copied all of your changes into a new branch:
pbarker@bluebottle:~/rc/ardupilot(master)$ git checkout jverhuls/Ardupilot-ibus-telemetry-feature-branch M modules/ChibiOS Note: checking out 'jverhuls/Ardupilot-ibus-telemetry-feature-branch'. You are in 'detached HEAD' state. You can look around, make experimental changes and commit them, and you can discard any commits you make in this state without impacting any branches by performing another checkout. If you want to create a new branch to retain commits you create, you may do so (now or later) by using -b with the checkout command again. Example: git checkout -b <new-branch-name> HEAD is now at 8affe3512b Merge branch 'Ardupilot-ibus-telemetry-feature-branch' of https://github.com/jverhuls/ardupilot into Ardupilot-ibus-telemetry-feature-branch pbarker@bluebottle:~/rc/ardupilot((HEAD detached at jverhuls/Ardupilot-ibus-telemetry-feature-branch))$ git merge master Already up to date. pbarker@bluebottle:~/rc/ardupilot((HEAD detached at jverhuls/Ardupilot-ibus-telemetry-feature-branch))$ git diff remotes/origin/master >/tmp/some.patch pbarker@bluebottle:~/rc/ardupilot((HEAD detached at jverhuls/Ardupilot-ibus-telemetry-feature-branch))$ git checkout -b tmp remotes/origin/master Previous HEAD position was 8affe3512b Merge branch 'Ardupilot-ibus-telemetry-feature-branch' of https://github.com/jverhuls/ardupilot into Ardupilot-ibus-telemetry-feature-branch Branch 'tmp' set up to track remote branch 'master' from 'origin'. Switched to a new branch 'tmp' pbarker@bluebottle:~/rc/ardupilot(tmp)$ patch -p1 </tmp/some.patch patching file Tools/ardupilotwaf/ardupilotwaf.py patching file libraries/AP_IBus_Telem/AP_IBus_Telem.cpp patching file libraries/AP_IBus_Telem/AP_IBus_Telem.h patching file libraries/AP_SerialManager/AP_SerialManager.h patching file libraries/AP_Vehicle/AP_Vehicle.cpp patching file libraries/AP_Vehicle/AP_Vehicle.h pbarker@bluebottle:~/rc/ardupilot(tmp)$ git add libraries/AP_IBus_Telem/AP_IBus_Telem.cpp libraries/AP_IBus_Telem/AP_IBus_Telem.h pbarker@bluebottle:~/rc/ardupilot(tmp)$ git commit -C 23cd811bf40fdeeddb156997b09f64d4630e0b68 -a [tmp e242e7ffeb] AP_IBus_Telem: optimize code - adding feature flag - styling Author: Jan Verhulst <[email protected]> Date: Sat Feb 13 08:04:01 2021 +0100 6 files changed, 342 insertions(+) create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h pbarker@bluebottle:~/rc/ardupilot(tmp)$ git commit --amend -m "add support for IBus protocol" [tmp fec51a0ead] add support for IBus protocol Author: Jan Verhulst <[email protected]> Date: Sat Feb 13 08:04:01 2021 +0100 6 files changed, 342 insertions(+) create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h pbarker@bluebottle:~/rc/ardupilot(tmp)$ git show commit fec51a0ead20ff4f33961d890eb75b27584e008b (HEAD -> tmp) Author: Jan Verhulst <[email protected]> Date: Sat Feb 13 08:04:01 2021 +0100 add support for IBus protocol diff --git a/Tools/ardupilotwaf/ardupilotwaf.py b/Tools/ardupilotwaf/ardupilotwaf.py index fb2d2be0be..f83eaa244f 100644 --- a/Tools/ardupilotwaf/ardupilotwaf.py +++ b/Tools/ardupilotwaf/ardupilotwaf.py @@ -64,6 +64,7 @@ COMMON_VEHICLE_DEPENDENT_LIBRARIES = [ 'AP_Button', 'AP_ICEngine', 'AP_Frsky_Telem', + 'AP_IBus_Telem', 'AP_FlashStorage', 'AP_Relay', 'AP_ServoRelayEvents', diff --git a/libraries/AP_IBus_Telem/AP_IBus_Telem.cpp b/libraries/AP_IBus_Telem/AP_IBus_Telem.cpp new file mode 100644 index 0000000000..e635f34383 pbarker@bluebottle:~/rc/ardupilot(tmp)$ ./Tools/gittools/git-subsystems-split rm: cannot remove '/tmp/tmp.7ZKk8CmyeI': No such file or directory Reseting changes in order to add files separately... Adding and committing subsystems... [tmp 1aca27019e] AP_IBus_Telem: add support for IBus protocol Author: Jan Verhulst <[email protected]> 2 files changed, 326 insertions(+) create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h [tmp a1f6a43e7e] AP_SerialManager: add support for IBus protocol Author: Jan Verhulst <[email protected]> 1 file changed, 1 insertion(+) [tmp c68b693d2b] AP_Vehicle: add support for IBus protocol Author: Jan Verhulst <[email protected]> 2 files changed, 14 insertions(+) [tmp 198d28d8b1] Tools: add support for IBus protocol Author: Jan Verhulst <[email protected]> 1 file changed, 1 insertion(+) pbarker@bluebottle:~/rc/ardupilot(tmp)$ git log commit 198d28d8b1faa37adb912d720b56d38929707bc9 (HEAD -> tmp) Author: Jan Verhulst <[email protected]> Date: Sun Feb 14 21:52:41 2021 +1100 Tools: add support for IBus protocol commit c68b693d2babf977200f4fb096cc023d32cf7336 Author: Jan Verhulst <[email protected]> Date: Sun Feb 14 21:52:40 2021 +1100 AP_Vehicle: add support for IBus protocol commit a1f6a43e7e9ceb88083b62376fed5de9b3996490 Author: Jan Verhulst <[email protected]> Date: Sun Feb 14 21:52:40 2021 +1100 AP_SerialManager: add support for IBus protocol commit 1aca27019ef7c7f49626ce1dc7ba61c8a7226de0 Author: Jan Verhulst <[email protected]> Date: Sun Feb 14 21:52:40 2021 +1100 AP_IBus_Telem: add support for IBus protocol commit 1b74058842954e7257c6475f21042be2102fe768 (origin/master, origin/HEAD, pr/ibus, master) Author: Peter Barker <[email protected]> Date: Wed Feb 10 12:16:43 2021 +1100 pbarker@bluebottle:~/rc/ardupilot(tmp)$ git push github tmp Counting objects: 22, done. Delta compression using up to 4 threads. Compressing objects: 100% (18/18), done. Writing objects: 100% (22/22), 6.65 KiB | 6.65 MiB/s, done. Total 22 (delta 14), reused 6 (delta 4) remote: Resolving deltas: 100% (14/14), completed with 9 local objects. remote: remote: Create a pull request for 'tmp' on GitHub by visiting: remote: https://github.com/peterbarker/ardupilot/pull/new/tmp remote: To ssh://github.com/peterbarker/ardupilot.git * [new branch] tmp -> tmp pbarker@bluebottle:~/rc/ardupilot(tmp)$If you're happy with that branch (https://github.com/ArduPilot/ardupilot/compare/master...peterbarker:tmp?expand=1) then I'll push it over your github branch.
Thanks seems very fine, you can go ahead and merge it into my branch! Could you also paste the commands to do that? I'm wondering how you are going to remove the old messy commits :) Many thanks.
On Sun, 14 Feb 2021, jverhuls wrote:
@jverhuls The git history was basically to messy to be worth cleaning up, so I essentially just copied all of your changes into a new branch:
s/to/too/
If you're happy with that branch (https://github.com/ArduPilot/ardupilot/compare/master...peterbarker:tmp?expand=1) then I'll push it over your github branch.Thanks seems very fine, you can go ahead and merge it into my branch! Could you also paste the commands to do that? I'm wondering how you are going to remove the old messy commits :) Many thanks.
The above commands actually did that. Roughly speaking I took all of the changes and shoved them into a single commit, gave it an appropriate commit message and then used git-subsystems-split to split it into our commit-per-directory standard.
I've pushed over that branch now.
You'll want to move your existing local branch by that name aside so you can work on top of that remote branch (using git mv and then git checkout of the remote branch).
Did you want another review on that PR yet?
Did you want another review on that PR yet? yes please.
The only thing I didn't do was the Threading. I can do it, but not sure if it is useful. Currently the ibus telemetry works well (tested it with my FS-IA6B and Flysky I6x).
Thanks for the help and reviewing
I would like to give this a try on real hardware, there are only 2 things I would need to know. Is this branch good enough now? Are there additional configuration steps required for the port (SERIAL#_OPTIONS)?
I’ve been having the following problem when trying to use iBus:
https://discuss.ardupilot.org/t/kakute-f7-ibus-receiver-not-working/67441/2
I would like to give this a try on real hardware, there are only 2 things I would need to know. Is this branch good enough now? Are there additional configuration steps required for the port (SERIAL#_OPTIONS)?
I’ve been having the following problem when trying to use iBus:
https://discuss.ardupilot.org/t/kakute-f7-ibus-receiver-not-working/67441/2
I replied on it.
@aa-calvo any reports on your success or failure with this code?
Might pay to test the most recent check-in here.
Please use serial protocol 38 to test, as it recently changed due to merges
@jverhuls I just rebased the autotests I wrote for this support and its complaining that there's no test for "sensor 4" - did you add that recently? If you cherry-pick the test commit in from my pr/ibus-tests branch you can reproduce with ./Tools/autotest/autotest.py build.Copter test.Copter.IBus. Otherwise I'll poke the tests to add support for sensor 4, whatever that is...
Could you split this into a one-commit-per-directory thing (use Tools/gittools/git-subsystem-split to do that), please?
I tried with SERIAL6_PROTOCOL set to both 37 and 38 and still no luck. I left SERIAL6_OPTIONS at 0, since I wasn't instructed otherwise. Just to clarify, I need this to also be RCIN not only ibus telemetry and also the receiver is connected through a "telemetry" converter module, as seen in the discussion https://discuss.ardupilot.org/t/kakute-f7-ibus-receiver-not-working/67441/2.
@peterbarker yes I added sensor 4 (GPS is healthy) as I found it convenient not to look to my gps all the time if it was healthy. Sorry didn't know it would break your tests.
I tried the Tools/gittools/git-subsystem-split on my mac, but it wouldn't split, I couldn't understand why.
Output:
janverhulst@Jans-MacBook-Pro ardupilot % ./Tools/gittools/git-subsystems-split
rm: /var/folders/5k/55q5r_1s29b7jjxrn_tlj0ym0000gn/T/tmp.iE5ZwUyz: No such file or directory
Reseting changes in order to add files separately...
Adding and committing subsystems...
[tmp aa4354ed6c] libraries/AP_IBus_Telem/AP_IBus_Telem.cpp: add support for IBus protocol
6 files changed, 351 insertions(+)
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h
On branch tmp
Your branch is ahead of 'javer/Ardupilot-ibus-telemetry-feature-branch' by 0 commits.
(use "git push" to publish your local commits)
nothing to commit, working tree clean
Couldn't commit subsystem libraries/AP_IBus_Telem/AP_IBus_Telem.h, aborting...
Program interrupted or finished with error(s), reseting head...
Trying to re-add files...
Files re-added.
Thank you for the info. I understand now that the pull request for IBUS telemetry and the being able to use IBUS as an RC-Input while connected to the TX pin are different. But would you happen to know which SERIAL6_OPTIONS flag will allow my configuration to work? Sorry for posting something unrelated, but since you guys have been really helpful, I thought I would ask here.
@peterbarker yes I added sensor 4 (GPS is healthy) as I found it convenient not to look to my gps all the time if it was healthy. Sorry didn't know it would break your tests.
I'll update the test...
I tried the Tools/gittools/git-subsystem-split on my mac, but it wouldn't split, I couldn't understand why. Output:
Works for me - would you like me to push over your branch here?
pbarker@bluebottle:~/rc/ardupilot(tmpx2)$ ./Tools/gittools/git-subsystems-split rm: cannot remove '/tmp/tmp.lEP4PycmoC': No such file or directory
Reseting changes in order to add files separately...
Adding and committing subsystems...
[tmpx2 ca9f51fd30] AP_IBus_Telem: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
2 files changed, 335 insertions(+)
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.cpp
create mode 100644 libraries/AP_IBus_Telem/AP_IBus_Telem.h
[tmpx2 80879e54bd] AP_SerialManager: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
1 file changed, 1 insertion(+)
[tmpx2 1233c3f92c] AP_Vehicle: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
2 files changed, 14 insertions(+)
[tmpx2 8b163a4939] Tools: add support for IBus protocol
Author: Jan Verhulst <[email protected]>
1 file changed, 1 insertion(+)
pbarker@bluebottle:~/rc/ardupilot(tmpx2)$
I've marked this for discussion at our DevCallEU.
Not much left to go here, but we'll find out whether stashing the sensor values is considered worthwhile or whether we should just deliver them.
BTW, could you provide a link to a device which uses this protocol, please?
Typically FlySky receivers have IBus telemetry: i.e. https://www.flysky-cn.com/ia6b-canshu The Flysky I6(X) is a popular beginner transmitter (https://www.flysky-cn.com/i6-gaishu) which is mostly used in combination with that receiver.
Additionally, i see in betaflight they request the values every time: https://github.com/betaflight/betaflight/blob/master/src/main/telemetry/ibus_shared.c
On Mon, 22 Feb 2021, jverhuls wrote:
@peterbarker would it make sense to remove them all and put them as variables in the loop (update) function?
No, we don't use static variables in ArduPilot (as much as possible).
Additionally, i see in betaflight they request the values every time: https://github.com/betaflight/betaflight/blob/master/src/main/telemetry/ibus_shared.c
Yep. Can we move to just getting the values when polled, please?
I may be able to test as well, as my end-goal when asking for #9419 was to be able to use my FlySky FS-i6 Tx and my various FlySky FS-ia6b/ia6c/RX2S with ArduPilot.
I'm making a FliteTest Mini Mustang which I hope to power with a PixRacer and FS-i6/FS-ia6c combo for full telemetry on the radio.
On Thu, 15 Apr 2021, Saijin-Naib wrote:
I may be able to test as well, as my end-goal when asking for #9419 was to be able to use my FlySky FS-i6 Tx and my various FlySky FS-ia6b/ia6c/RX2S with ArduPilot.
Would be really nice to get this tested so it can get into the 4.1 releases.
I have one here but haven't managed to get it organised yet.
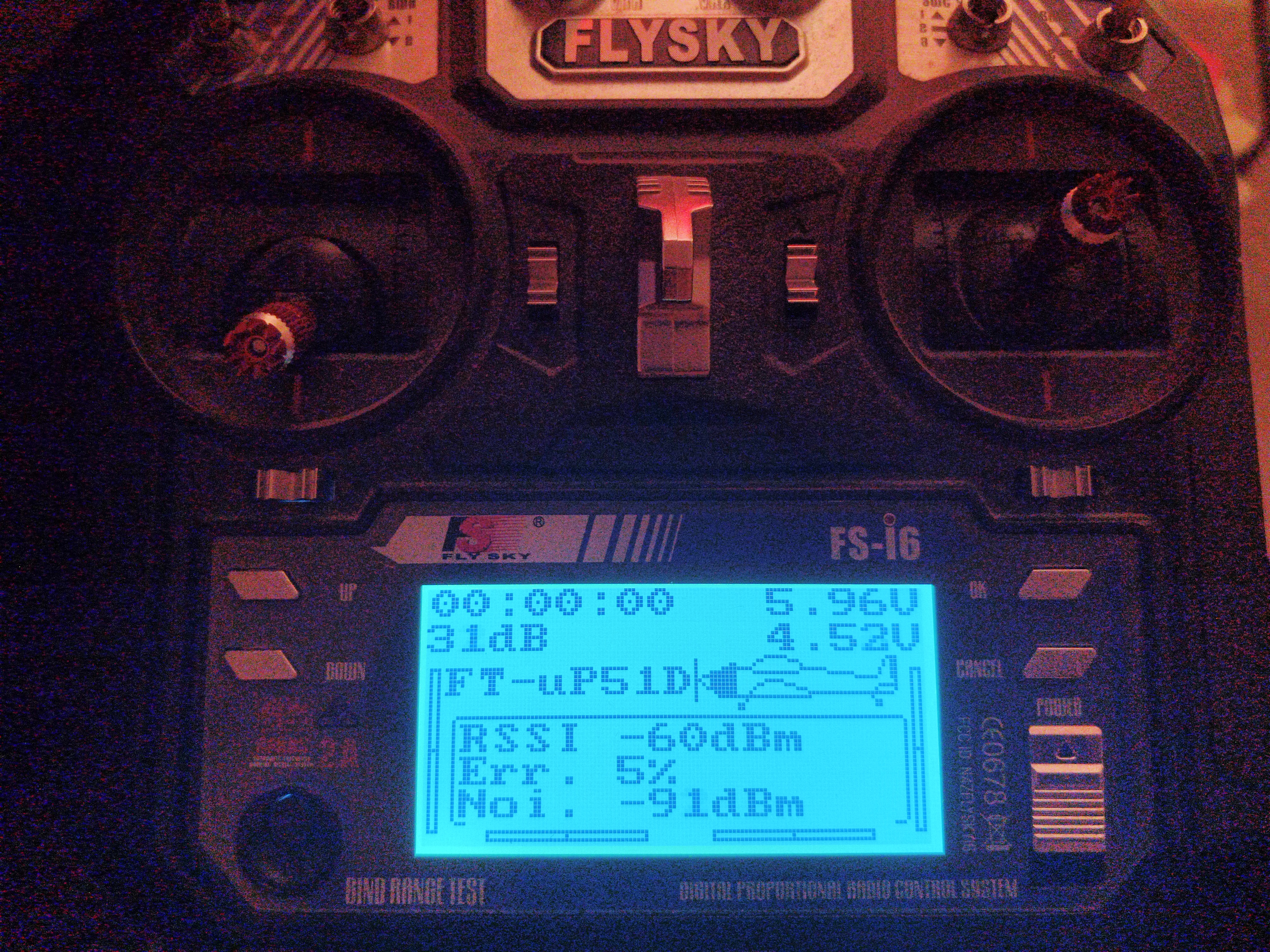
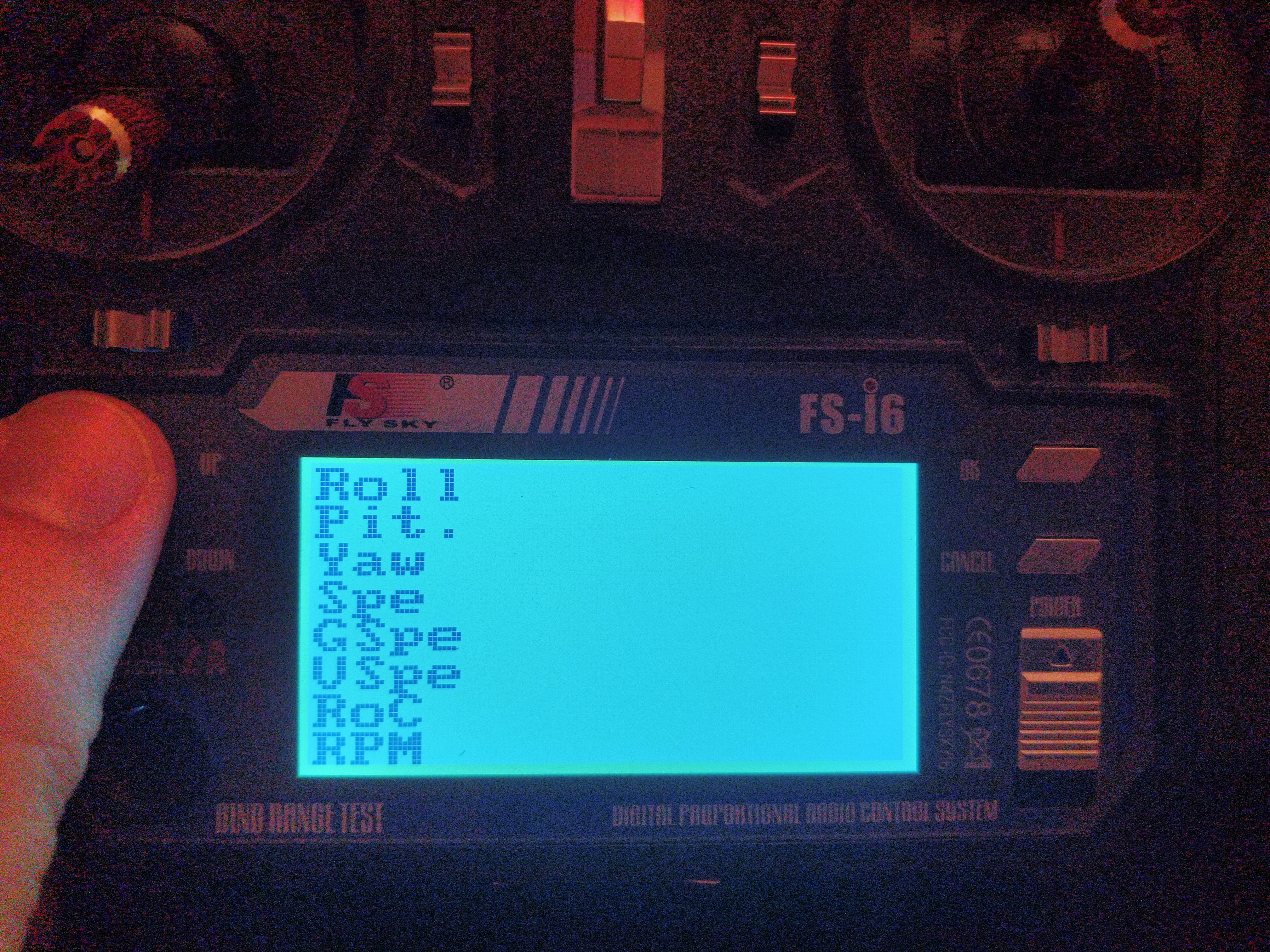
I think I have it all wired up for bench testing, unless I have to set up crazy parameters to get Arduplane v4.0.9 to send the telemetry to the Flysky.
If so, is there documentation? If not, I'm going to be pretty useless and I'll need help getting going.
They are talking, but not telemetry:



I'm an idiot. This isn't merged anywhere, so how do I expect to test it with a stable release? 🤦
Does anyone have a compiled PixRacer image with these changes so I can try benchtesting it? I have my FS-i6 on the latest FlyPlus v1.7.6 firmware and ready to go.
Any insight on what release tag this might be merged for so I can try testing?
this would be in a future release so it needs to be rebased upon master and continued to be worked on from there