Camera module automatically shut down after starting, on the latest master branch
System information
- OS Platform and Distribution (e.g., Linux Ubuntu 18.04): Ubuntu 20.04
- Apollo installed from (source or binary): source
- Apollo version (3.5, 5.0, 5.5, 6.0): 7.0 master branch
-
Output of
apollo.sh configif onmasterbranch:[INFO] Apollo Environment Settings: [INFO] APOLLO_ROOT_DIR: /apollo [INFO] APOLLO_CACHE_DIR: /apollo/.cache [INFO] APOLLO_IN_DOCKER: true [INFO] APOLLO_VERSION: master-2022-02-16-8fc0381 [INFO] DOCKER_IMG: dev-x86_64-18.04-20210517_1712 [INFO] APOLLO_ENV: STAGE=dev USE_ESD_CAN=false [INFO] USE_GPU: USE_GPU_HOST=1 USE_GPU_TARGET=1
Steps to reproduce the issue:
- Please use bullet points and include as much details as possible:
- Successfully start, build Apollo without errors
- Strictly following the instructions from https://github.com/ApolloAuto/apollo/blob/master/docs/howto/how_to_run_perception_module_on_your_local_computer.md
- When running
cyber_launch start /apollo/modules/perception/production/launch/perception_camera.launch, the module first start, then automatically shut down. Here is the terminal output: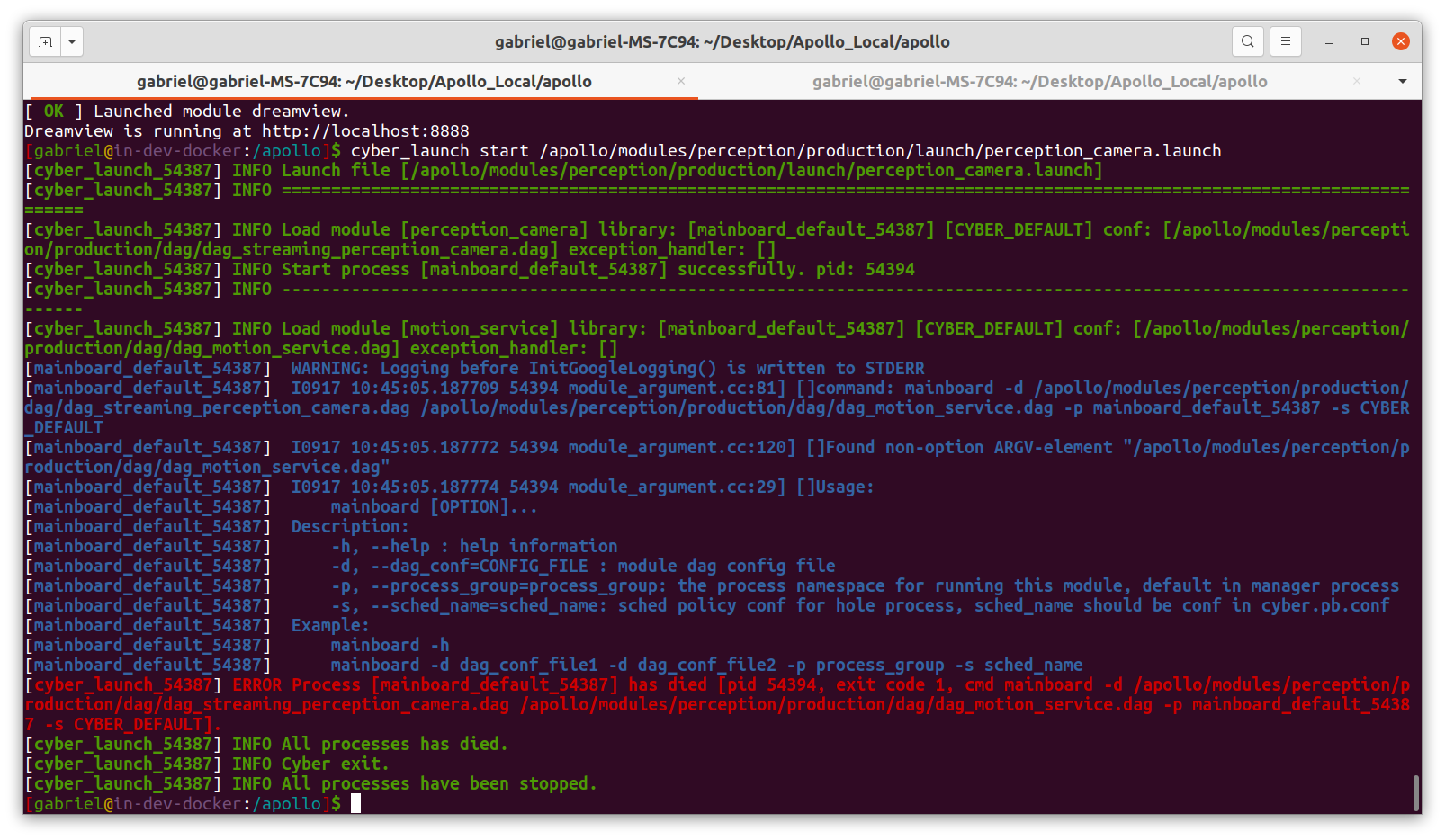 Here is the log result from mainboard:
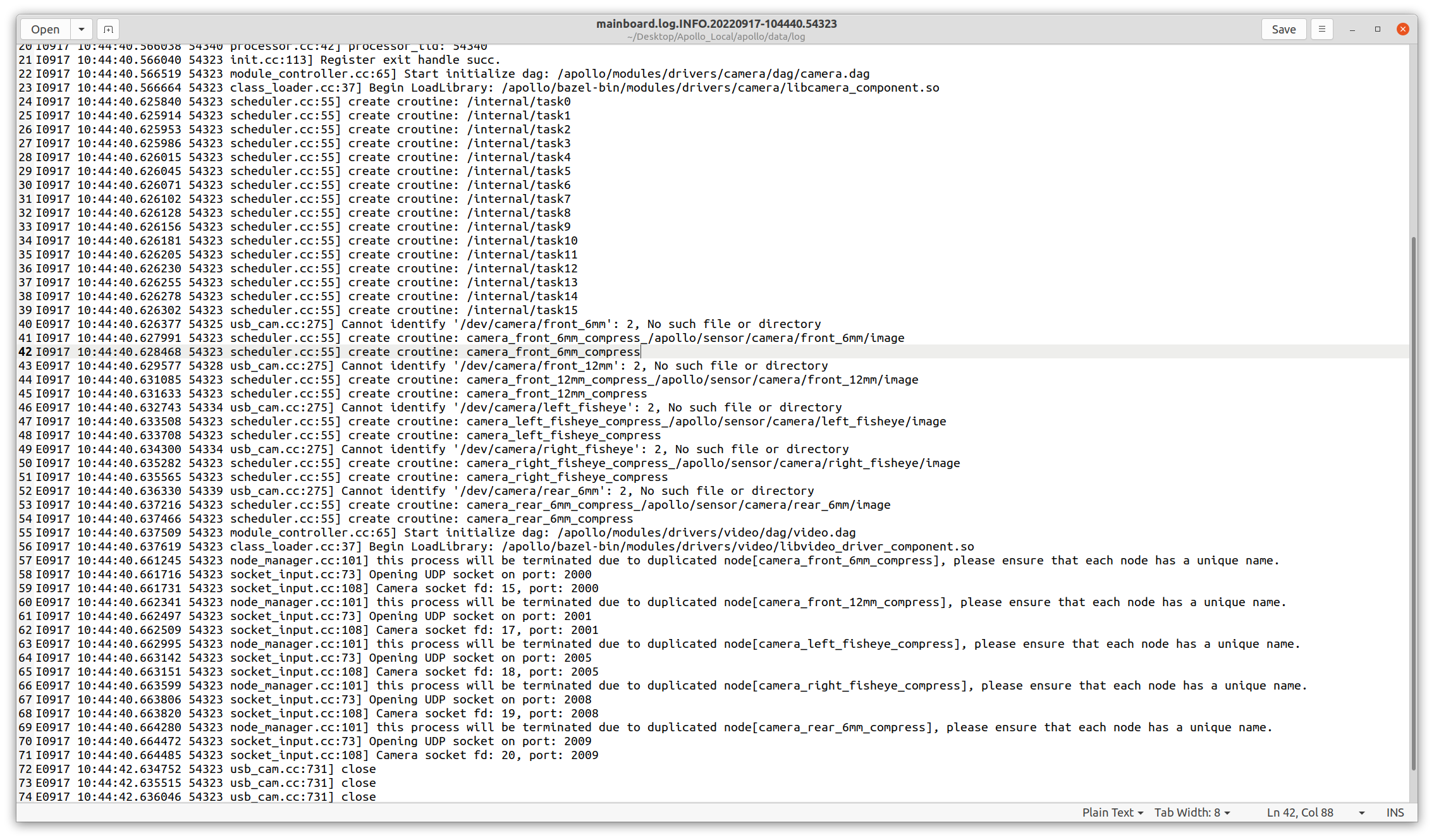
Here is the log result from mainboard:
I want to test the perception-camera module, especially the obstacle-detection capability. I have a recording containing only images generated from Apollo DaoxiangLake Dataset.
The perception, traffic light module appears to be started successfully:
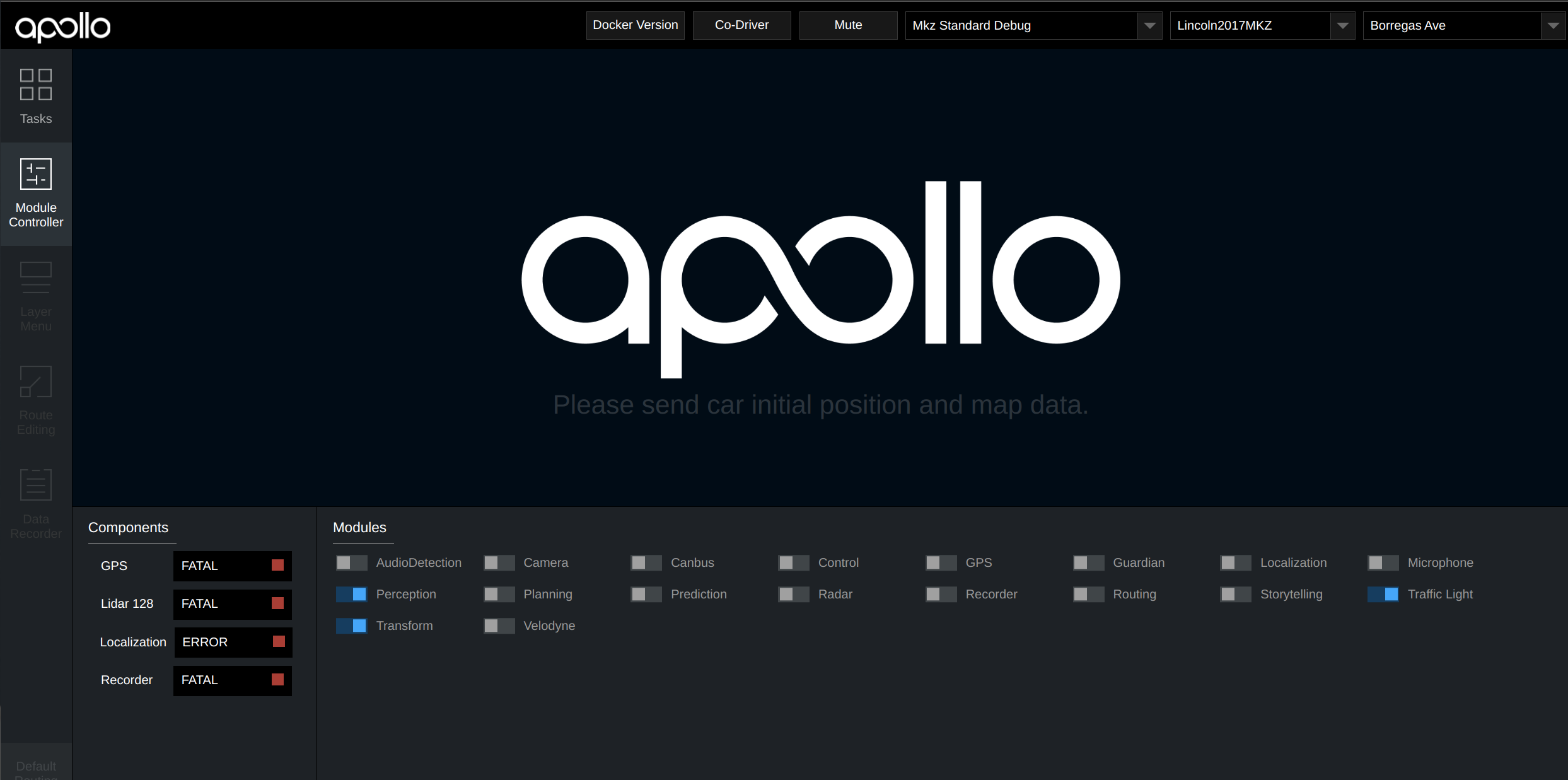
Supporting materials (screenshots, command lines, code/script snippets):
According to the error message, you started 2 identical nodes, which is the cause of the error.
I also encounered this problem. I solved it by launching the motion_service dag separately and remove the this module in this camera perception *.launch file.
I am not sure if a duplicate node is the cause for this. When I encountered this problem, I checked that if the motion_service has been started or not (use command ps aux | fgrep mainboard ). And If a duplicate node is started, there will be very clear messgae telling you that the node is duplicate and it will not be started. What is more, starting a duplicate node will not fail a cyber_launch, it will just tell you that a duplicate node is found and it will not be started again.