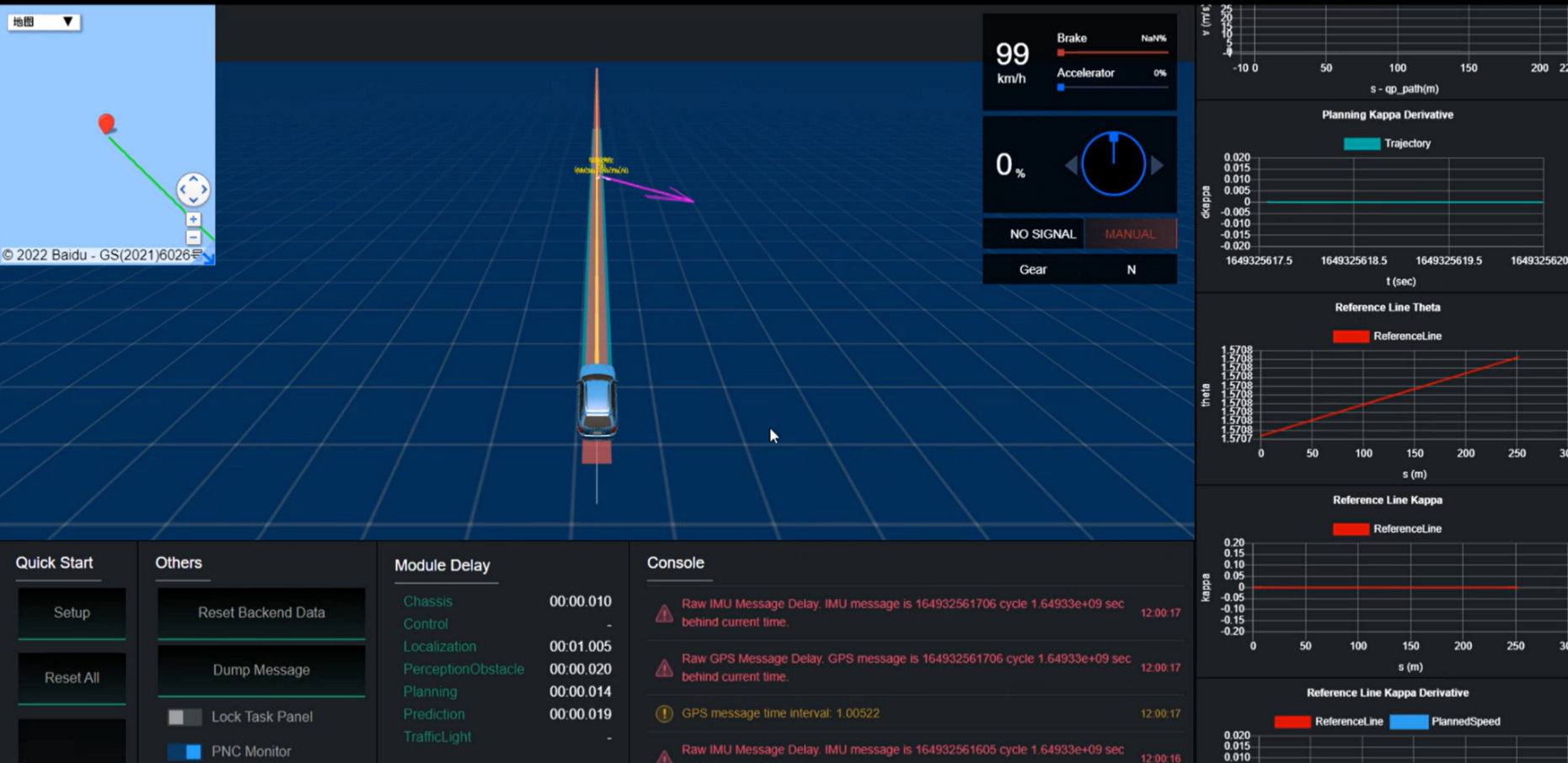
Real data from sensors, The car still not moving in dreamview
System information
**Linux Ubuntu 18.04 **Apollo installed from source **Apollo version master
Steps to reproduce the issue:
- We collect data from many sensors installed in car while driving
- Data are sent via tcpreplay to the right port to each module (Chassis, localization, perception) "udp"
- Open Dreamview and activate modules from module controler
- Data is well received (channels contain data 'cyber_monitor' + Module delay activated 'view in Tasks')
=>Result : data is well shown in dreamview browser using navigation mode
Expected Result: The car should move once activating planning because we now have a trajectory to follow
Questions:
1/ Working with real data from sensors should be in Navigation mode or Standard mode?
2/ Is routing should be activated after planning and create a request to see the car moving?
**3/**Using RTKLocalization that get data from gnss drivers (this driver was updated to parse ublox gps), but still information is sent in odometry channel. Is this flow right? where The RTKlocalization expect to get information (odometry, InsStat, correctedImu)?
=>TESTS
COMPARING WITH RATIO IN CHANNELS USING RECORD
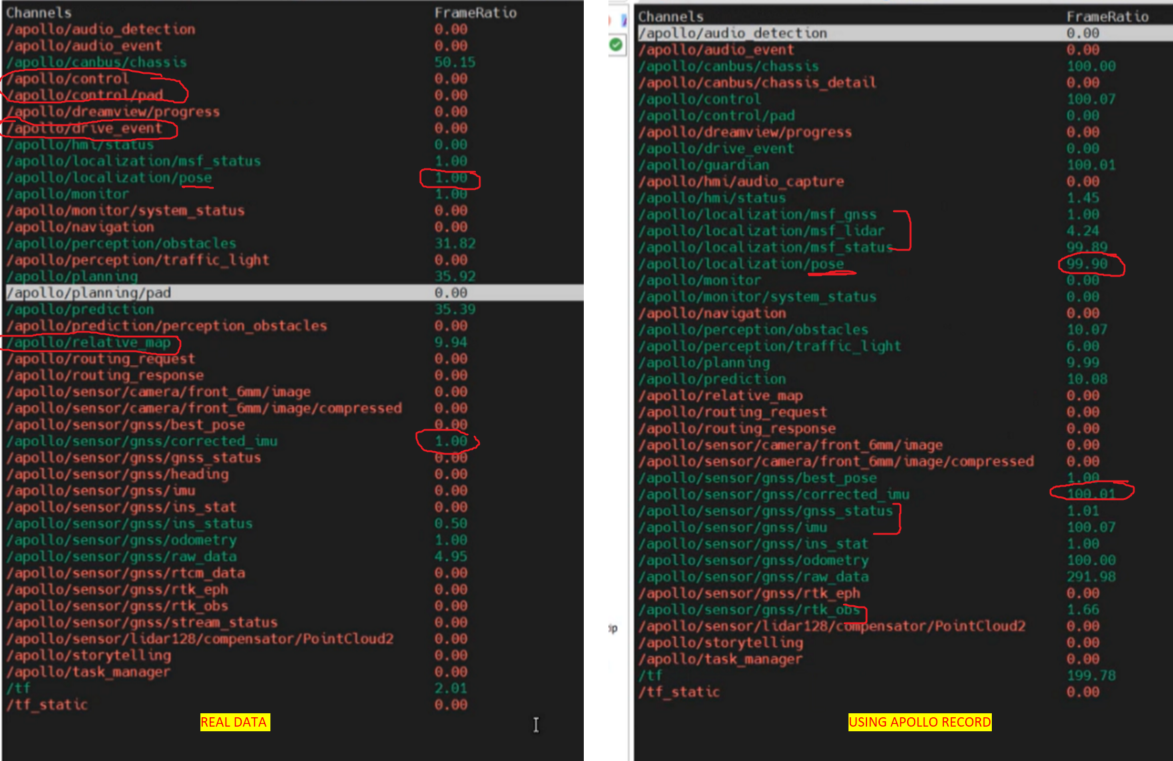
I can't understand all the gnss channels, and so where do we expect to have data using RTKlocalization?
If you have any idea about how this should be tested?? THANK YOU
1/ Working with real data from sensors should be in Navigation mode or Standard mode? A: Standard mode. 2/ Is routing should be activated after planning and create a request to see the car moving? A:yes,The premise is to open routing module.Then if you create a request and open the planning ,routing will give routing response,then the car will move.
3. Using RTKLocalization that get data from gnss drivers (this driver was updated to parse ublox gps), but still information is sent in odometry channel. Is this flow right? where The RTKlocalization expect to get information (odometry, InsStat, correctedImu)?
RTK need below messages
- localization::Gps
- localization::CorrectedImu
- drivers::gnss::InsStat