Kalman-and-Bayesian-Filters-in-Python
 Kalman-and-Bayesian-Filters-in-Python copied to clipboard
Kalman-and-Bayesian-Filters-in-Python copied to clipboard
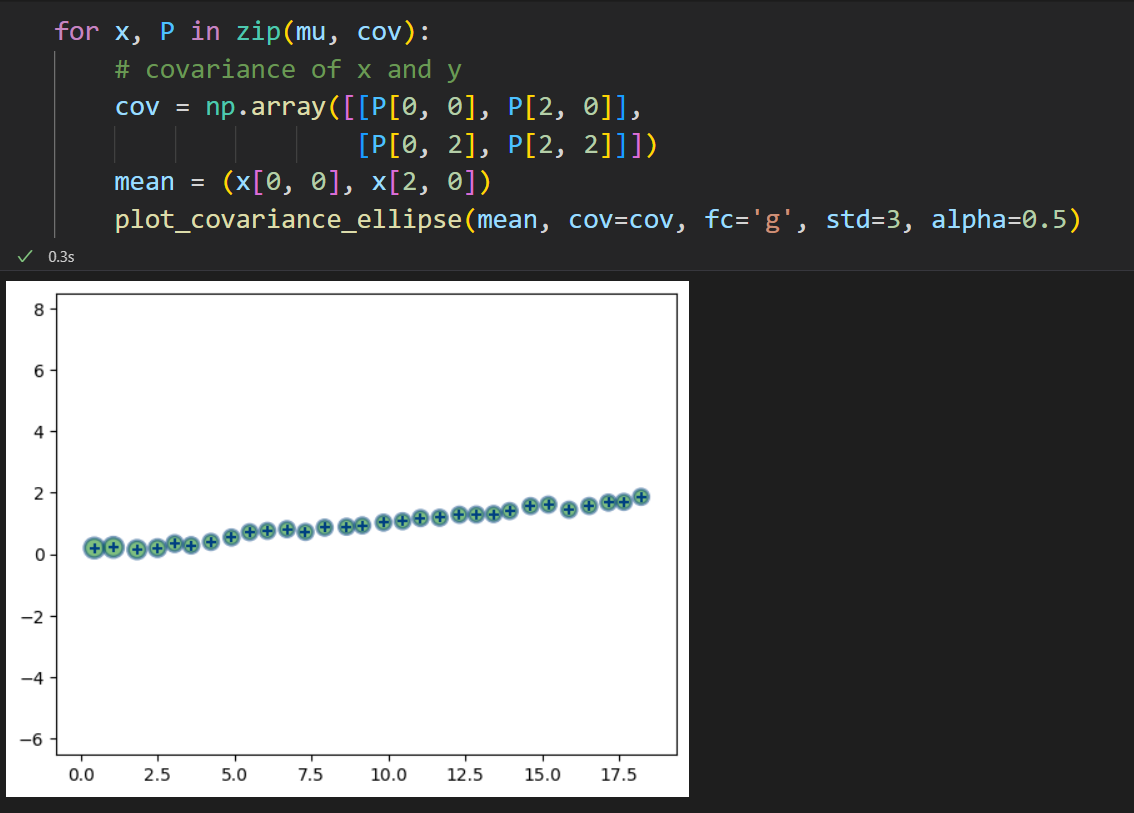
8.2.8 Implement the Filter
There is no figure, just the following traceback:
ValueError Traceback (most recent call last)
8.2. TRACKING A ROBOT 267 919 self.update(z, R=R, H=H) --> 920 means[i, :] = self.x 921 covariances[i, :, :] = self.P 922
ValueError: could not broadcast input array from shape (4,2) into shape (4,1)
The code runs correctly in the master branch. I've just tested it and it's okay.
I read the book via this link https://drive.google.com/file/d/0By_SW19c1BfhSVFzNHc0SjduNzg/view?usp=sharing&resourcekey=0-41olC9ht9xE3wQe2zHZ45A
Same error, after self.update(z, R=R, H=H), the self.x's get another column with all negative values, not sure what the new column represents.