PC
![]()
![]()
PC
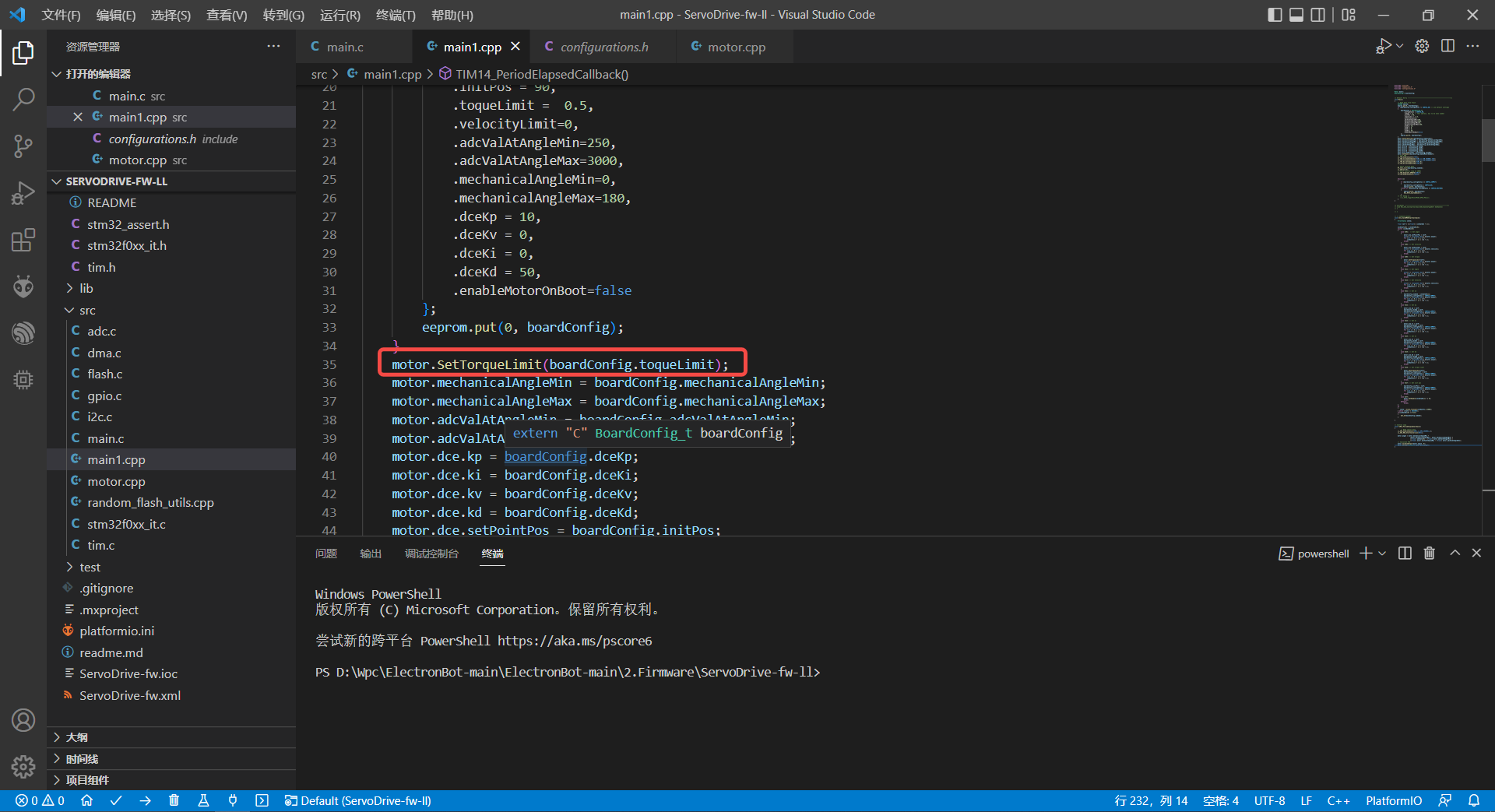
请问如何理解最大转矩的限制,用最大力矩作为位置环PI后的输出结果的限幅,这样可以做到限制输出力矩吗? 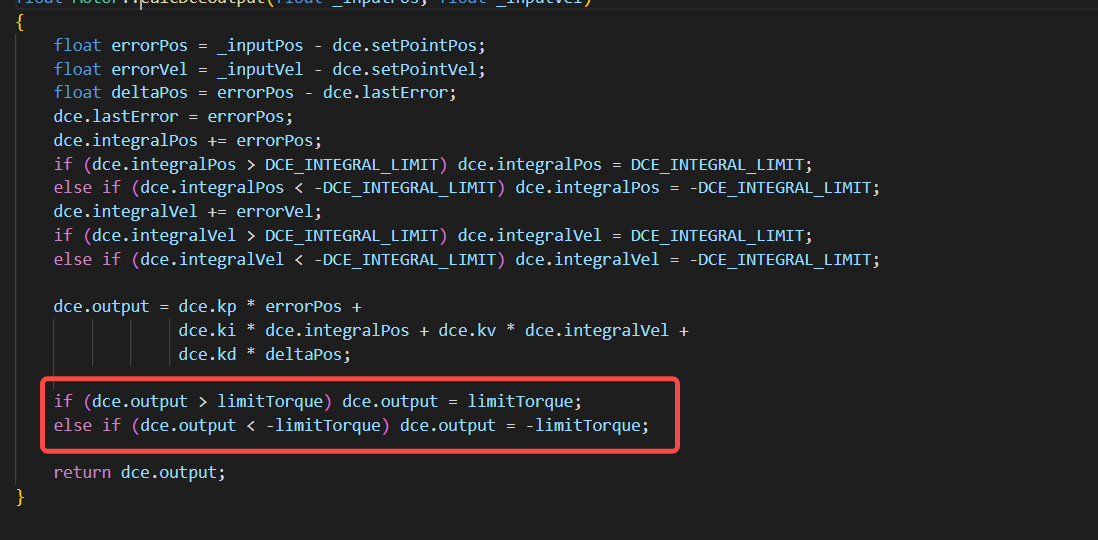 可以看到的是位置环PI后的结果,作为电机的PWM占空比赋值过去了 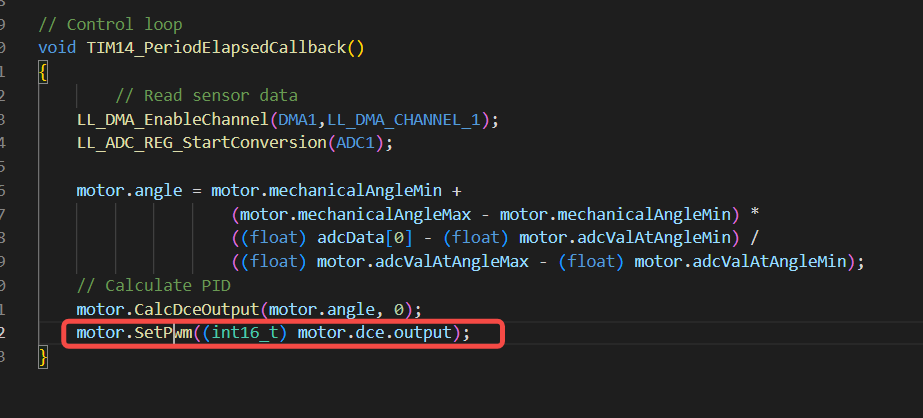
> 不太理解PID的输出值物理意义是电流值 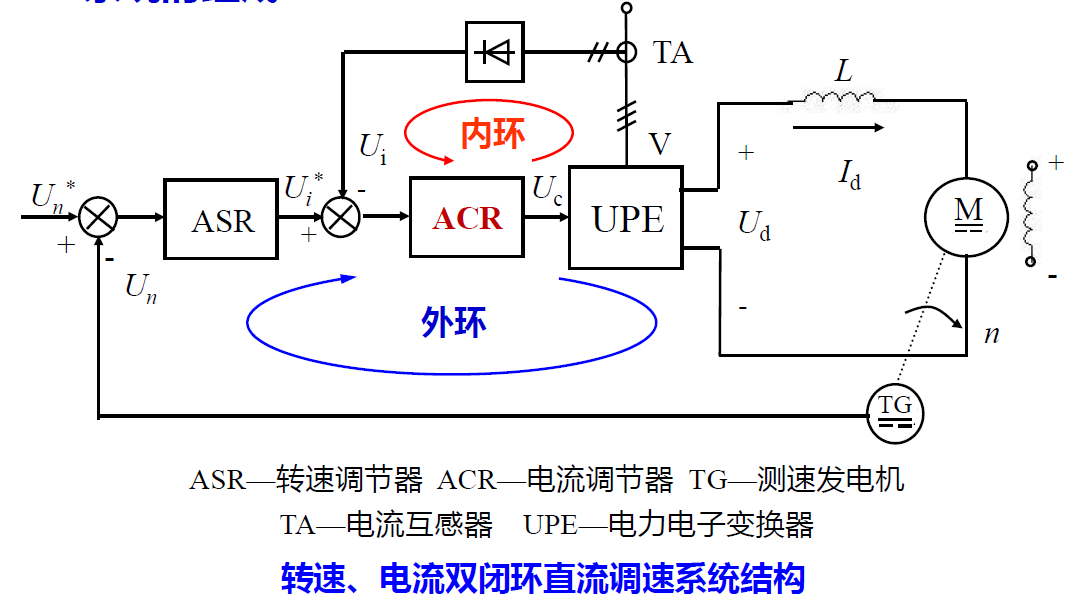 经典的双环控制系统,应该是电压环(转速环)作为外环,电压环的输出作为电流环的给定,外环的输出做限幅,则电流的给定就会有限幅,电流环作为内环也需要采集电流的实际值才可以进行内环环路的调节。 稚晖君的舵机驱动板中没有采集电流的实际值,所以应该也不存在电流环呀,是如何实现转矩限幅的呢? 麻烦大佬解答一下,对这块的认识可能有误区
> > > > > > > > > 不太理解PID的输出值物理意义是电流值  经典的双环控制系统,应该是电压环(转速环)作为外环,电压环的输出作为电流环的给定,外环的输出做限幅,则电流的给定就会有限幅,电流环作为内环也需要采集电流的实际值才可以进行内环环路的调节。 稚晖君的舵机驱动板中没有采集电流的实际值,所以应该也不存在电流环呀,是如何实现转矩限幅的呢? 麻烦大佬解答一下,对这块的认识可能有误区 > > 理论上是你图中的样子,转速转矩双环控制的转速环内环是电流环(转矩环),电流环的给定由转速环输出得到。 > > 但是具体到这个小舵机上来说,这么小的玩意,对转矩控制精度也不需要量化,没必要增加电流反馈电路来做电流环(转矩环),所以电流控制是开环的,系统中也就只有位置环+转速环+开环电流输出,于是最后输出给PWM就是期望的电流。 > > 所以限制电流即限制了转矩。 嗷嗷,我好像理解了。 那实际上这里设置的转矩限幅值是0.5,仅代表了最大输出转矩是0.5倍的最大电流,没有量纲,不代表是0.5A