Tianyu Hao
![]()
![]()
![]()
Tianyu Hao
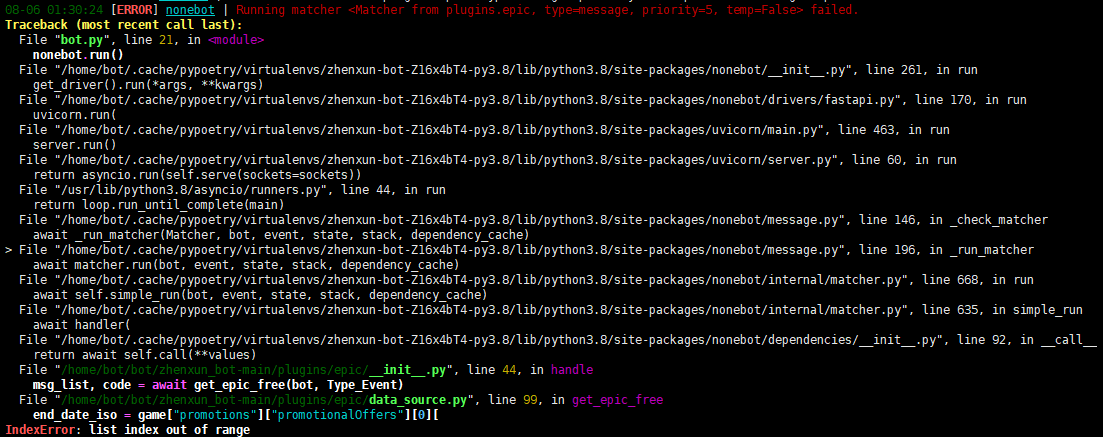
>  此为更新data_sorce源码后,仍然报错
4台iris做集群运动规划时,roslaunch ego_planner multi_uav.launch出现如上报错。通过楼上修改 后,运行一秒后再次崩溃出现报错。vins正常。 望解答 ====================== ubuntu18.04 px4 11.1 16GB RAM RTX4070(Laptop) i9-13900hk CUDA12.0.1 CUDNN8.9
但单机模拟时把报错的终端关闭,多重复几次roslaunch ego_planner single_uav.launch,有时候确实会成功,也不会有异常。多机时最多只有一个能够成功。报错表现确实像什么东西溢出了。
I meet this issue too