openpose_ros
 openpose_ros copied to clipboard
openpose_ros copied to clipboard
Openpose_ros_node_firephinx crashes on running
I run-
CUDA_VISIBLE_DEVICES=0 rosrun openpose_ros_pkg openpose_ros_node_firephinx
The node starts as this
OpenPose ROS Node
[ INFO] [1541368733.120120169, 1539892993.522311860]: Initialization Success
As soon as I start publishing images(from a bag file), the node crashes -
Segmentation fault (core dumped)
This is probably related to your OpenCV setup, which I talked about here: https://github.com/stevenjj/openpose_ros/issues/1#issuecomment-435726454
I couldn't run openpose_ros_node_firephinx neither. But I have a different error.
$ rosrun openpose_ros_pkg openpose_ros_node_firephinx OpenPose ROS Node [ INFO] [1548343474.741492354]: Initialization Success [ INFO] [1548343474.973164466]: Performing Forward Pass [ INFO] [1548343475.190324677]: Call Successful Forward Pass Success Got Keypoints Rendering Pose Outputing Image
(openpose_ros_node_firephinx:13284): Gtk-ERROR **: GTK+ 2.x symbols detected. Using GTK+ 2.x and GTK+ 3 in the same process is not supported Trace/breakpoint trap (core dumped)
I searched about this error, but I couldn`t understand yet. If you know about this error, I would be grateful if you give me advice.
I couldn't run openpose_ros_node_firephinx neither. But I have a different error.
$ rosrun openpose_ros_pkg openpose_ros_node_firephinx OpenPose ROS Node [ INFO] [1548343474.741492354]: Initialization Success [ INFO] [1548343474.973164466]: Performing Forward Pass [ INFO] [1548343475.190324677]: Call Successful Forward Pass Success Got Keypoints Rendering Pose Outputing Image
(openpose_ros_node_firephinx:13284): Gtk-ERROR **: GTK+ 2.x symbols detected. Using GTK+ 2.x and GTK+ 3 in the same process is not supported Trace/breakpoint trap (core dumped)
I searched about this error, but I couldn`t understand yet. If you know about this error, I would be grateful if you give me advice.
Hello, I also have a question to ask you, which version of ROS are you using? I am running rosrun openpose_ros_pkg openpose_ros_node here and I get the following error.
[rospack] Error: package 'openpose_ros_pkg' not found
Hello. I am using ROS kinetic.
Hello, I am also using ROS kinetic, are you using the https://github.com/stevenjj/openpose_ros.git file directly? Openpose is not updated yet, I am learning this now, but there are many unknown problems. Is it convenient to upload your project to github? Thank you.
Yes, I am using his file directory. And the directory I am using is exactly the same as him. Have you installed old version of openpose? When I was using recent openpose, openpose_ros couldn't work well. And I uploaded openpose_ros which I am using in my repository.
Yes, I am using his file directory. And the directory I am using is exactly the same as him. Have you installed old version of openpose(https://github.com/CMU-Perceptual-Computing-Lab/openpose.git)? When I was using recent openpose, openpose_ros couldn't work well. And I uploaded openpose_ros which I am using in my repository.
thanks, I installed old version of openpose(https://github.com/CMU-Perceptual-Computing-Lab/openpose.git),And I was using recent openpose, openpose_ros couldn't work well,Thank you for your project, I will go to your github download and try it out. Thank you.
It can`t work because of the openpose_ros_node_firephinx's error.
Is there an attempted to get the 3d extractor to work now?
Hello, is the 2D pose estimation good? Have you achieved 2D?
Hello. Opempose_ros_node_firephinx occured error, so I can't detect 2D pose.
Left terminal: My camera node
Center terminal: openpose_ros_node
Right terminal: openpose_ros_node_firephinx (The last Japanese means "core dump").

你好。 Opempose_ros_node_firephinx发生错误,因此我无法检测到2D姿势。
左侧终端:我的摄像机节点 中心终端:openpose_ros_node 右侧终端:openpose_ros_node_firephinx(最后一个日语表示“核心转储”)。

What is the configuration of the project you are running, and is the project downloaded? Have you modified it?
Sorry for the lack of information. I did $ roslaunch realsense2_camera rs_rgbd.launch $ rosrun openpose_ros_pkg openpose_ros_node $ rosrun openpose_ros_pkg openpose_ros_node_firephinx
I downloaded ・openpose , caffe , Pose model(https://github.com/CMU-Perceptual-Computing-Lab/openpose.git) ・openpose_ros(https://github.com/stevenjj/openpose_ros.git)
And I modified openpose_ros_node_firephinx.cpp、openpose_skeleton_extract.launch、skeleton_extract_3d_node.cpp、skeleton_extract_3d_visualization_node.cpp, camera resolution to 1280*720.
My environment: OS : Ubuntu16.04 LTS GPU : NVIDIA GeForce GTX 1080 CUDA8.0 cuDNN5.1 OpenCV3.2 Camera : RealSense D435
Am I properly answered your question? I'm not good at English.
@makino-ryota : From your error output, it looks like openpose is working but the OpenCV visualization is not. I suggest commenting these two lines out
cv::imshow("OpenPose ROS", outputImage);
cv::waitKey(1);
from
https://github.com/stevenjj/openpose_ros/blob/master/openpose_ros_pkg/src/openpose_ros_node_firephinx.cpp#L264
@zhengyuezhi: That link does not go to the old version that my github page specifies. The old version is specifically this commit hash: https://github.com/CMU-Perceptual-Computing-Lab/openpose/tree/a1e0a5f4136e702b5731a268c2993fb75ca4753c
@SilentLancer If the 2D version works for you, then the 3d version just uses PCL processing, so the 3D skeleton extraction should work.
@stevenjj is it possible to use a webcam to gather the PCL or that is only possible through a depth camera?
@makino-ryota : It's weird to me why you both run openpose_ros_node and openpose_ros_node_firephinx.
You don't really need openpose_ros_node_firephinx.
Can you instead try running these commands?
roslaunch realsense2_camera rs_rgbd.launch
rosrun openpose_ros_pkg openpose_ros_node
rosrun openpose_ros_pkg test_openpose_ros_service_call
Then open up Rviz and subscribe to the camera image /openpose_ros/detected_poses_image after running test_openpose_ros_service_call
@SilentLancer : If you have two webcams, you can get a stereo point cloud with http://wiki.ros.org/stereo_image_proc
@stevenjj Thank you for helping me. ①I commented out these two lines, openpose_ros_node_firephinx works well! Thank you. cv::imshow("OpenPose ROS", outputImage); cv::waitKey(1);
②openpose_ros_node_firephinx is not necessary to display openpose as you say. Thanks. Then it looks run well in the terminal,but camera's error happen.(surrounded by red rectangle) Which file should I modify?
And I have another question. openpose_ros_node always detect 4 people.(Upper right terminal)
Is this normal?

@makino-ryota Great. In Rviz, try using an Image topic instead of a Camera. You should see something similar to this:
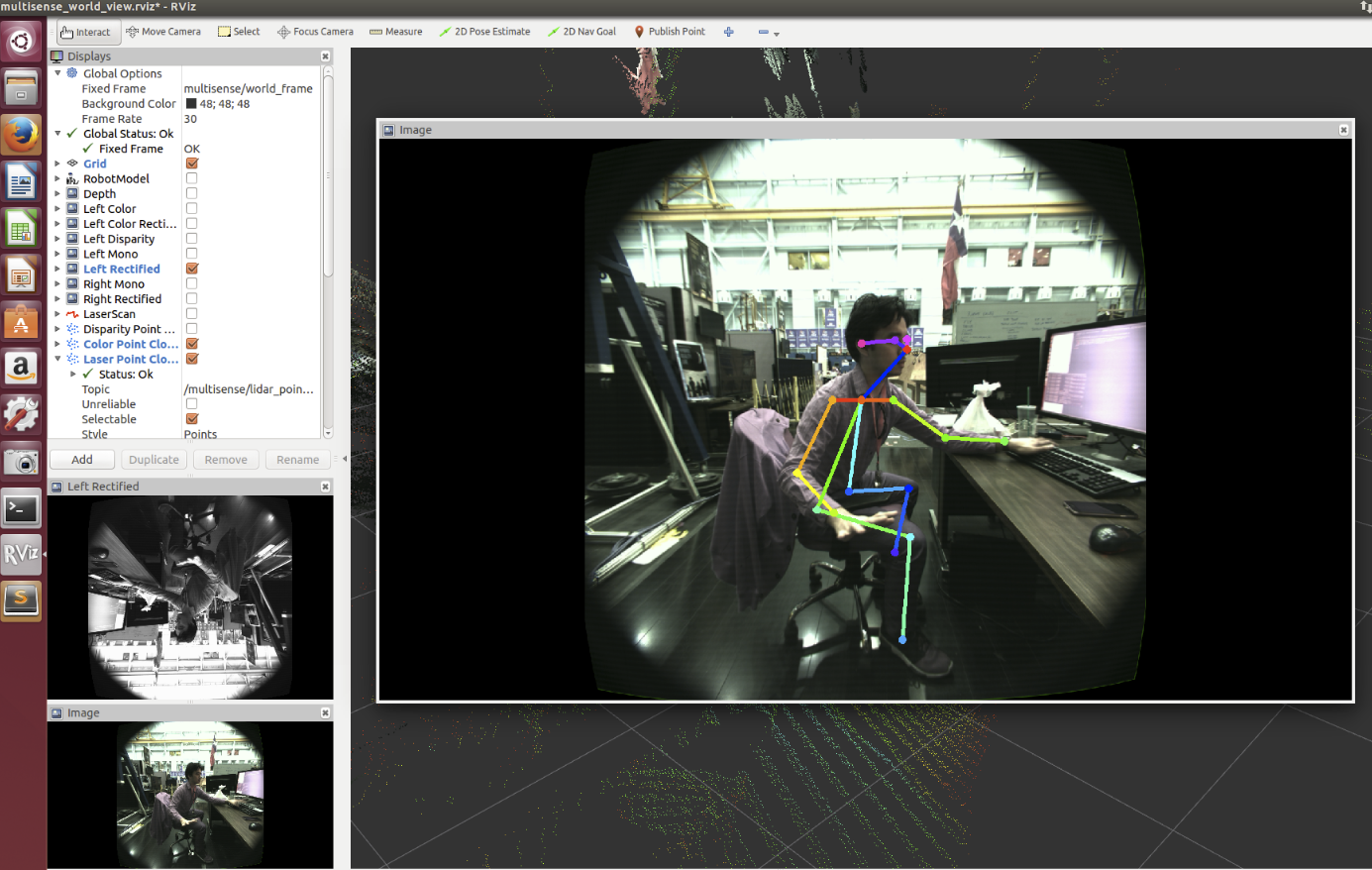 Previously, I saw that your setup detected 1 person. The performance of Openpose is environment sensitive. I would try to make sure to visualize what the detections are first.
Previously, I saw that your setup detected 1 person. The performance of Openpose is environment sensitive. I would try to make sure to visualize what the detections are first.
@stevenjj I changed to the image topic, there is no error in Rviz. And I understand why openpose_ros_node detect 4 people... It detected from this sample image.It was a simple oversight. openpose_ros_firephinx was able to detect me. Thank you so much!!
Then I tried to run skelton_extract_3d, It occurs error.
I want you ask about this issues in another page #8. I'd really appreciate it if you could give me your opinion.
