kitti_depthmap
 kitti_depthmap copied to clipboard
kitti_depthmap copied to clipboard
module for converting raw lidar in kitti to depthmap
kitti_depthmap
Module for converting raw lidar in kitti to depthmaps in C++/Python.
Why I wrote this
Surprisingly, I wasn't able to find any decent/simple/readable code online to figure out how to generate registered depthmaps from the kitti pointcloud data. And those that did, gave garbage results (when actually visualized as a pointcloud), or were written with for loops in python which were way too slow for a data pipeline. This codebase handles parallax errors that come from a large transformation between a sparse 3d sensor and an rgb image, and also performs resampling in spherical coordinate space, leading to more accurate results. .
To Run
mkdir build;
cd build;
cmake ..;
make
python3 testing.py # Change the path in the file to point to the kitti data
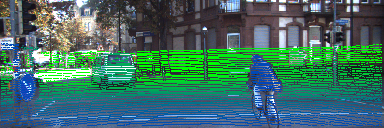
Large Image
Accounting for parallax distortion etc.

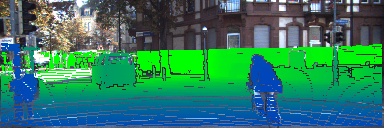
Small Image
Works well for small images too

Sampling Modes (Lower)
Selectively simulate a higher or lower resolution lidar in spherical space

Upsampling (Higher)
Selectively simulate a higher or lower resolution lidar in spherical space
Metadata
Owner
Metadata
module for converting raw lidar in kitti to depthmap