Openrave output
Dear
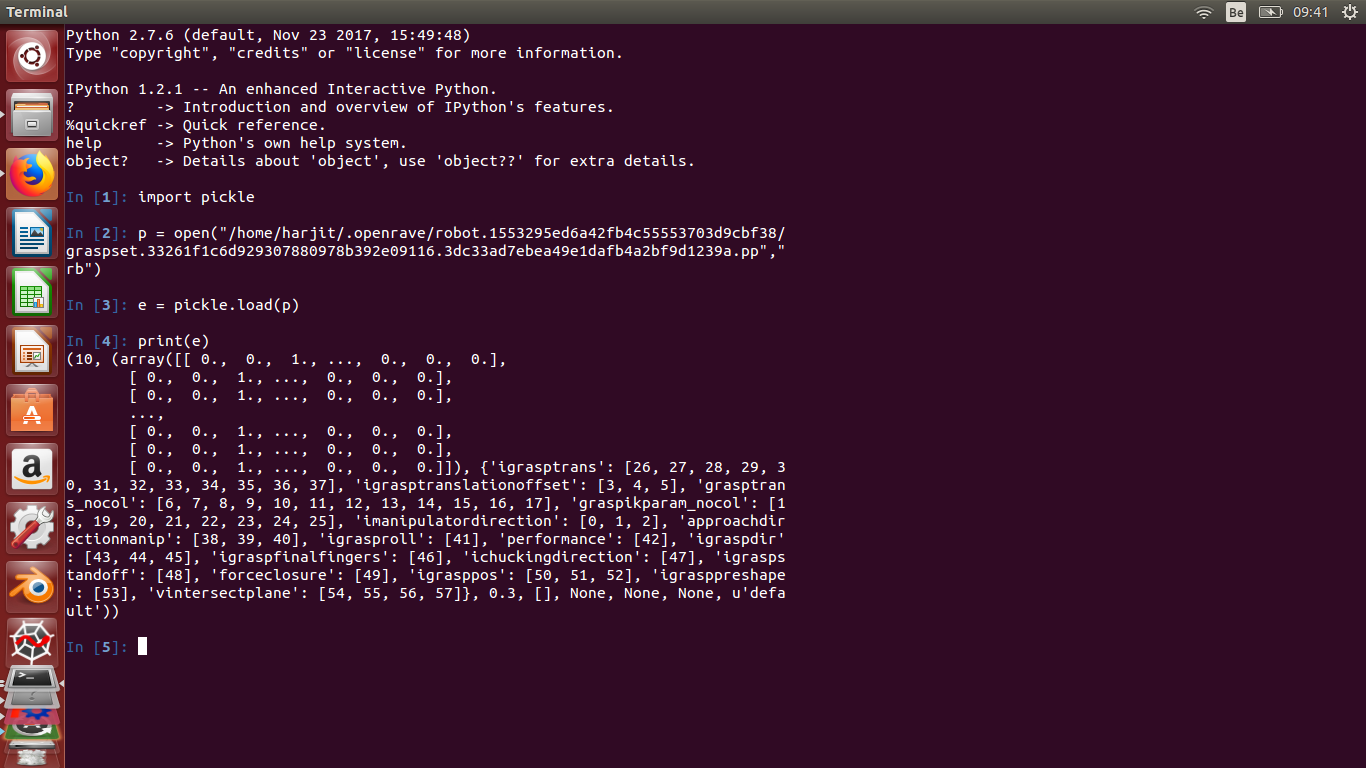
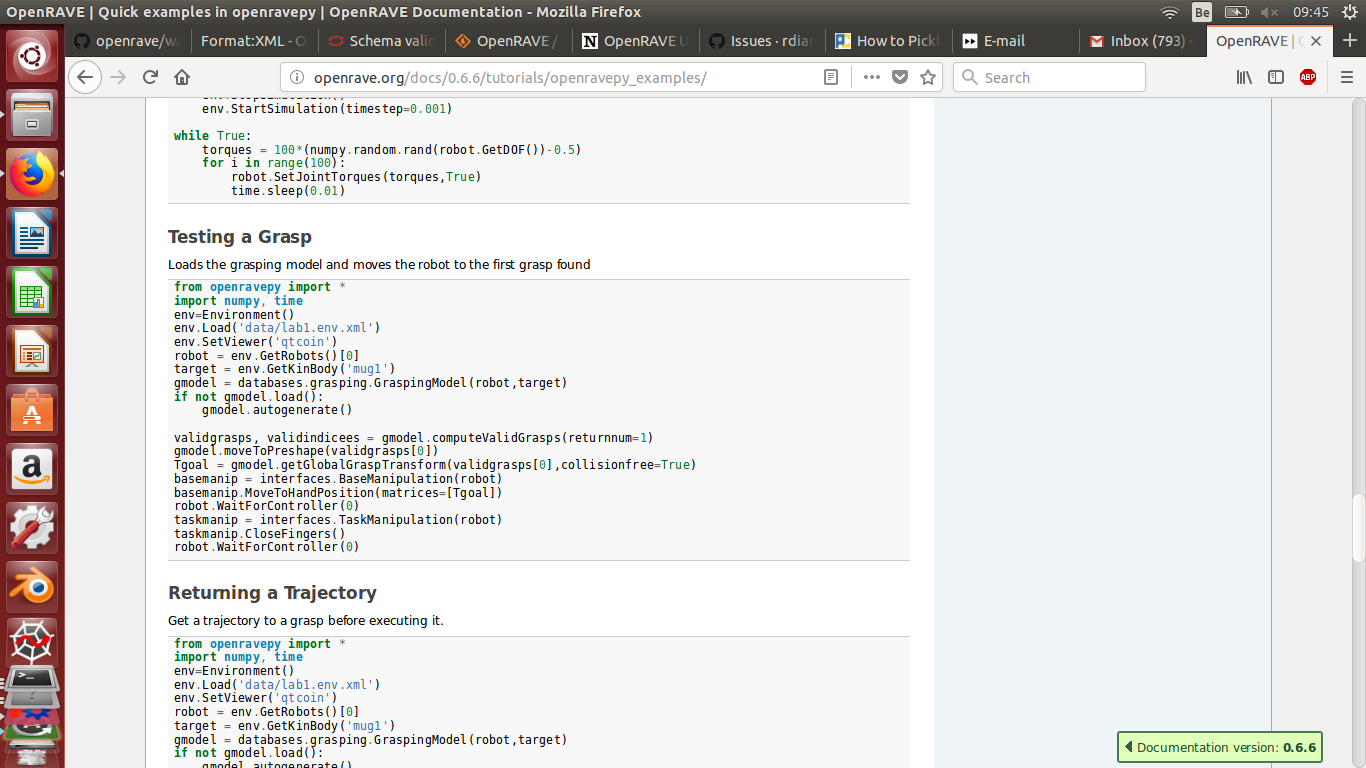
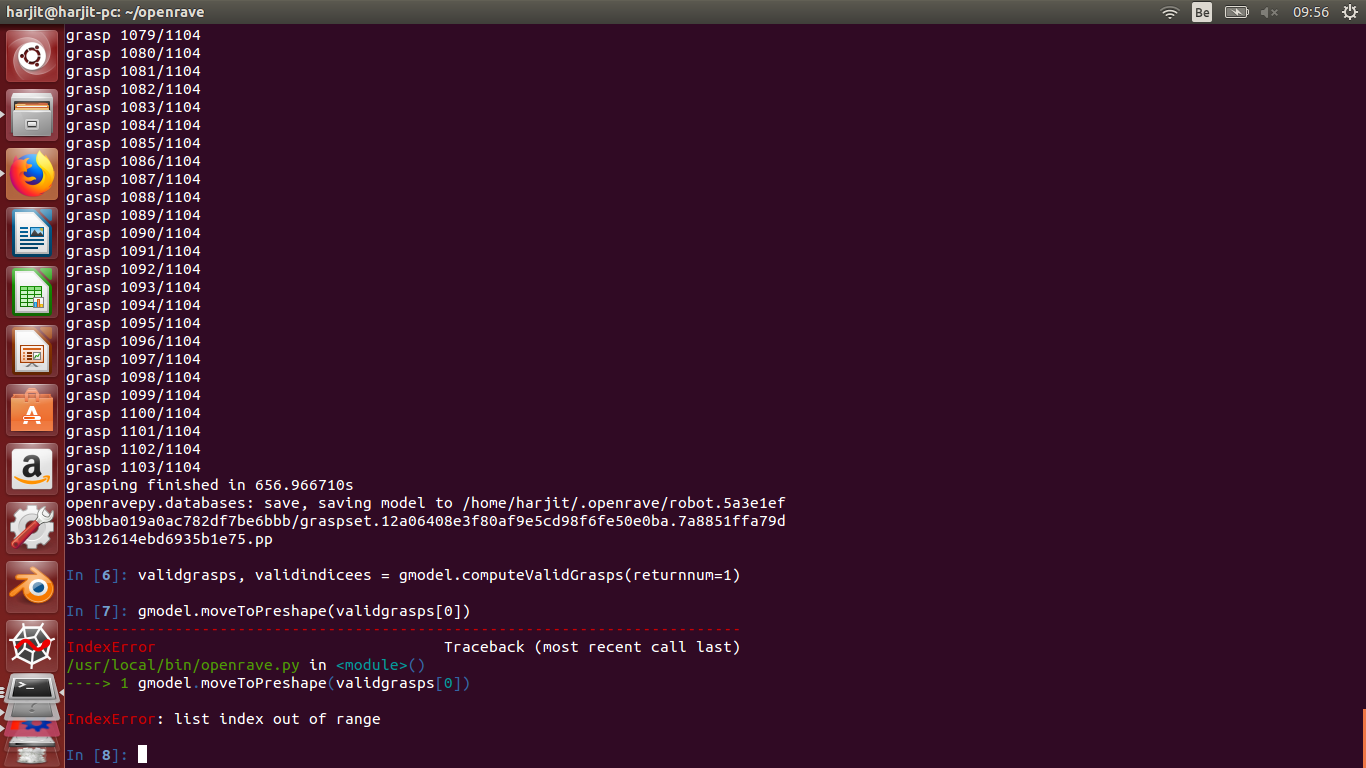
Me and my colleague are working on our thesis. The subject is the automation of a bin-pick process. For this task we need grasping software that can determine possible grasping positions depending on the imported CAD-model. We installed OpenRave and imported the models but we have a problem figuring out the output of the software. All we get is a .pp file with a large matrix. We also tried to find the good grasps with the commando 'vallidgrasps' like the printscreen shows, but it shows that 'index out of range'. Is there anywhere we can figure out what the graspposition is for the found good grasps
PS: for the .pp file, we converted the file through python, with the pickle commands. but we can't figure out what it means, or if it even means anything.
Thanks in advance
Kind Regards
Imre and Harjit
- http://openrave.org/docs/latest_stable/openravepy/databases.grasping/
- https://github.com/roboticslab-uc3m/teo-grasp/tree/1e4ca9a96e06aa4c6eb7215f0fe98588eaaa90a8/example/python