ORB_SLAM2
 ORB_SLAM2 copied to clipboard
ORB_SLAM2 copied to clipboard
KITTI Mono ROS Example works but KITTI Stereo ROS Example doesn't work
Hi and thanks a lot for this great code.
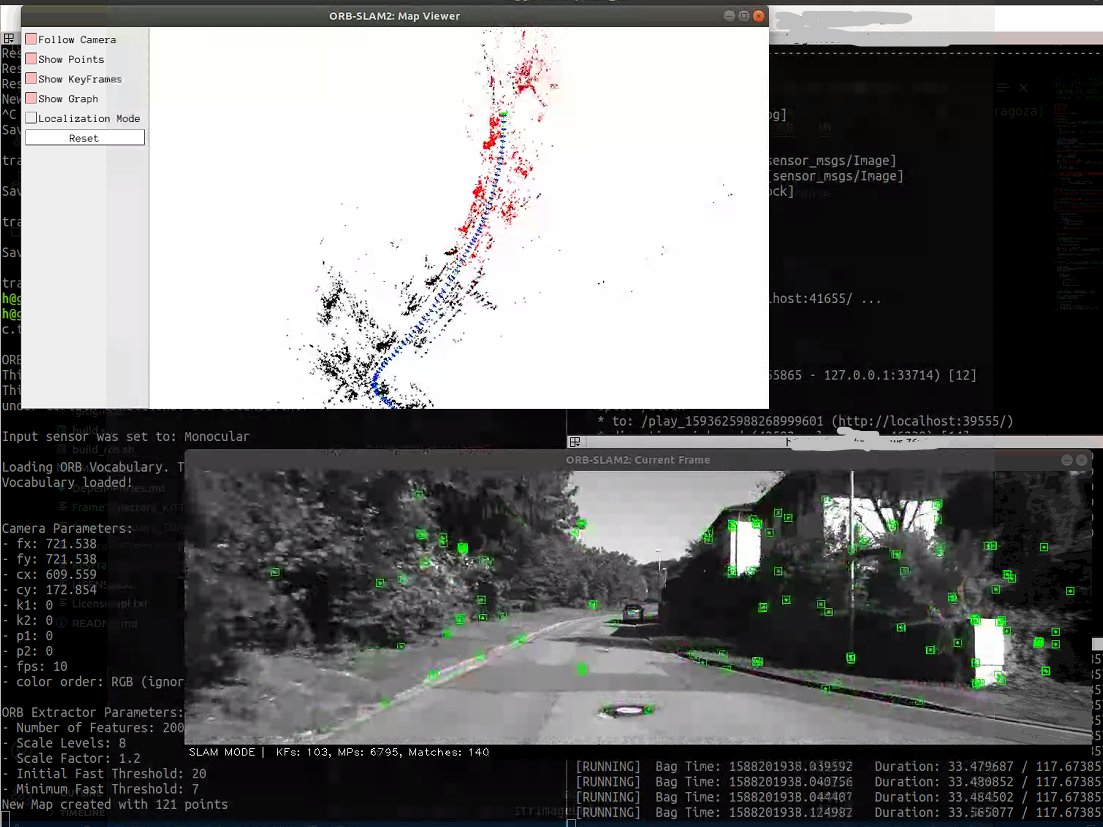
When I used a rosbag contains left and right gray images topics and mapped topics names to the expected ones from the Stereo node. When I run this command rosrun ORB_SLAM2 Mono $PWD/Vocabulary/ORBvoc.txt Examples/Monocular/KITTI03.yaml the SLAM works perfectly as shown below:
When I run this command rosrun ORB_SLAM2 Stereo $PWD/Vocabulary/ORBvoc.txt $PWD/Examples/Stereo/KITTI03.yaml false
SLAM doesn't work at all, it just shows me the images without any features and without odometry data(camera poses) as shown below:

And as you can see I always get this log in the terminal:
System Reseting
Reseting Local Mapper... done
Reseting Loop Closing... done
Reseting Database... done
New map created with 0 points
Track lost soon after initialisation, reseting...
System Reseting
Reseting Local Mapper... done
Reseting Loop Closing... done
Reseting Database... done
New map created with 0 points
Could anyone help with this case? I've looked a lot for a solution but it seems there's no similar case except for this issue https://github.com/raulmur/ORB_SLAM2/issues/828
Hi, Did you check the name of the nodes subscribed: message_filters::Subscriber<sensor_msgs::Image> left_sub(nh, "/camera/left/image_raw", 1); message_filters::Subscriber<sensor_msgs::Image> right_sub(nh, "/camera/right/image_raw", 1); I guess you may make mistake here