map_prediction_enhanced_exploration
 map_prediction_enhanced_exploration copied to clipboard
map_prediction_enhanced_exploration copied to clipboard
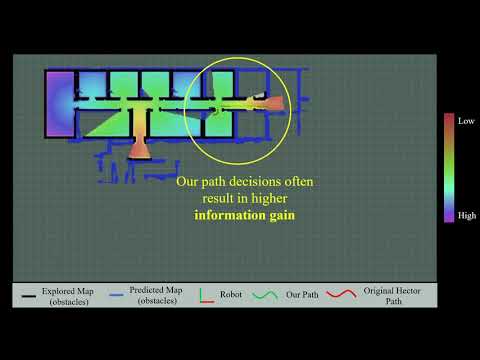
Open-source modules for ICRA 2019 submission "Learned Map Prediction for Enhanced Mobile Robot Exploration"
About
Open-source modules for ICRA 2019 submission "Learned Map Prediction for Enhanced Mobile Robot Exploration"
Supplementary Video
Preprint
Modules
Online Map Completion
Variational Autoencoder Network for map prediction
online_map_completion_msgs
ROS messages and services for communicating the map prediction data
Stage frontier datagen
Data generation and exploration evaluation programs
Ground truth layer
ROS Costmap layer for building ground truth maps from laser and pose
Stage
Fork of Stage Simulator rtvstage
Hector navigation
Fork of hector navigation for hector exploration planner (hector_navigation)
libfloorplan
Fork of kth_libfloorplan for parsing KTH floorplan dataset
Building
Clone the repo to src directory of your workspace
git clone https://github.com/rakeshshrestha31/map_prediction_enhanced_exploration
cd map_prediction_enhanced_exploration
git submodule update --init --recursive
install dependencies
bash install_deps.sh
rosdep install --from-paths src --ignore-src -y -r
Build the Stage simulator
cd <stage_directory>
mkdir build
cd build
cmake ..
make -j<num_jobs>
sudo make install
(Note: if you don't want the simulator to be installed in /usr/local set CMAKE_INSTALL_PREFIX appropriately)
Build the libfloorplan library
cd <libfloorplan_directory>
mkdir build
cd build
cmake ..
make -j<num_jobs>
make install
# this can be added to .bashrc or .zshrc
export LIB_FLOORPLAN_PATH=<libfloorplan_directory>
Build the catkin workspace
catkin build
Download KTH dataset
cd <datasets_directory>
wget http://www.csc.kth.se/~aydemir/KTH_CampusValhallavagen_Floorplan_Dataset.tar.bz2
tar xvf KTH_CampusValhallavagen_Floorplan_Dataset.tar.bz2
Generating partial maps dataset
rosrun stage_frontier_datagen kth_stage_node _dataset_dir:=<kth_dataset_dir> _data_record_dir:=<generated_dataset_dir>
Metadata
Owner
Metadata
Open-source modules for ICRA 2019 submission "Learned Map Prediction for Enhanced Mobile Robot Exploration"