AD-litianjiao
AD-litianjiao
In fact, apollo planning does not support referenceline intersection,even in 2d world. You can open PNC Monitor to see whether reference intersection, which will cause sl-projection fault
Could you use 'bash scripts/control_info.sh' to see the error of position speed and accerelation Have to say,you are really brave to drive the car to 130km/h with apollo
the target speed is always 14m/s. Maybe you should check planning
@storypku It seems lost tkinter in image. `in-dev-docker:/apollo/scripts]$ bash control_info.sh` `Traceback (most recent call last): File "/apollo/bazel-bin/modules/tools/control_info/control_info.runfiles/apollo/modules/tools/control_info/control_info.py", line 30, in import tkinter.filedialog ModuleNotFoundError: No module named 'tkinter'
@BBlumi97 you can install it in docker: sudo apt-get install tcl-dev tk-dev python3-tk then run control_info.sh
maybe you should upate your apt source sudo apt-get update
> after updating i got the script running. But only one plot has graphs on it. But maybe it helps you anyway. > > 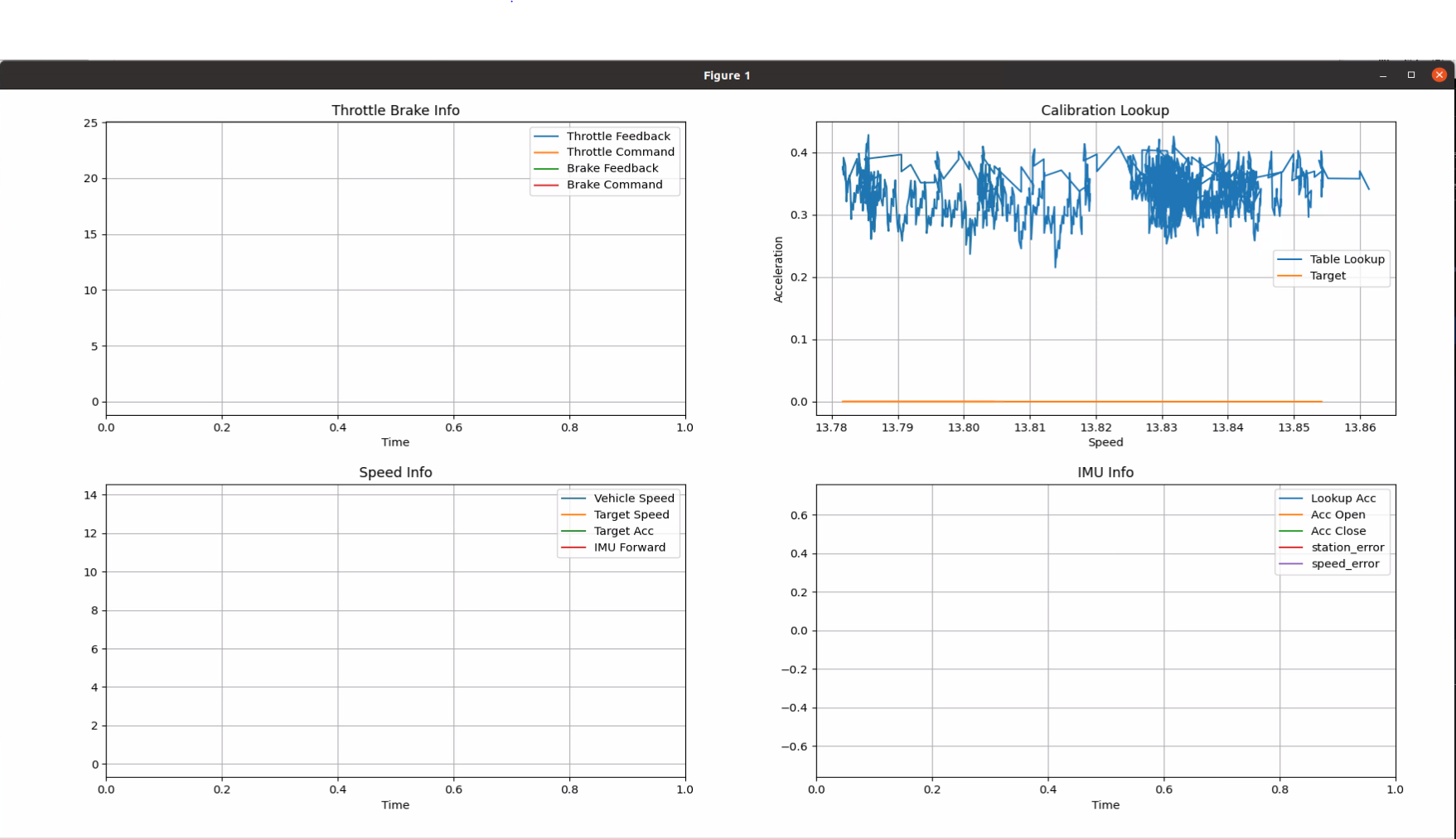 use `cyber_monitor` to see control...
1. Some parameters are related with time, like stitching trajectory. Even if input message is same, but in different time planning start point is different. 2. No. the reason is...
离散点平滑曲率计算方法存在一些近似,以及对曲率约束松弛化。如果需要严格约束曲率可以采用螺旋曲线平滑spiral_smoother算法
Sorry we can‘t give you more advice to trigger this condition, maybe you need to change other code (for example scenario_manager.cc)to make overlap lack