BlocklyProp
 BlocklyProp copied to clipboard
BlocklyProp copied to clipboard
S3 Stall sensor broken
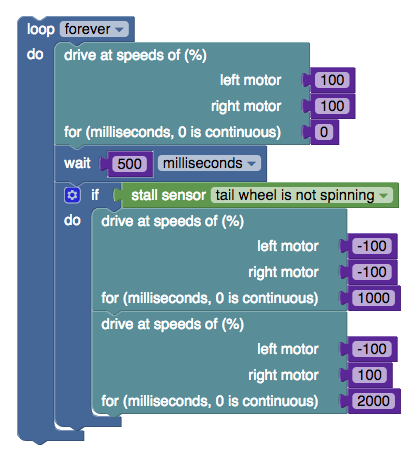
S3 stall sensor will not detect a stalled tail wheel or stalled left and right wheels. The code used to test is show below.


Also, try a repeat loop with a "communicate" block that simply displays the results of the tail wheel.
If I remember correctly, the Spin code for the tail wheel only works if it was preceded by a non-blocking drive command (as you have done).
I've tried different combinations of blocks and am able to get it working but it's inconsistent. All it takes is adding an additional block here or there and it stops working.
We may need to fine tune this stall block but what is happing is that the customer was using values of 50 in his motor blocks and with the tail wheel spinning at half speed it did not produce enough encoder passes to satisfy the stall sensor. The stall sensor detected it as a stall but the tail wheel was just moving to slow. Adding a pause 500milli after the first block also helps. It gives the wheel time to spin and produce enough encoder ticks so that the stall sensor won't detect it as a stall. This topic is not explained in the tutorials so it will be a good idea to either fine tune the stall block or give an explanation in the S3 block help and reference guide.
Where are we at with this one? I remember working on it, but I think we decided this needed to be handled in the docs....?