mmdetection3d
 mmdetection3d copied to clipboard
mmdetection3d copied to clipboard
def inference_segmentor (model, pcd) -- intput & output
Hello.
There is inference_segmentor(model, pcd) in '/mmdet3d/apis/inference.py' file.
I know the inputs of the function are trained model, and .bin file.
But I don't know which part of the bin file is used. (deeper part)
Could you tell me about that?
Thanks in advance.
I'm not quite understand your questions, you mean, the structure of bin file or something else?
data = dict( pts_filename=pcd, img_fields=[], bbox3d_fields=[], pts_mask_fields=[], pts_seg_fields=[], bbox_fields=[], mask_fields=[], seg_fields=[])
Value 'data' is in function "inference_segmentor(model, pcd)".
Where do the internal elements of the value 'data' get assigned values?(I guess it gets values from .bin file)
And the reason why I'm asking you this question is ...
When I run pc_seg_demo.py. I get result like below
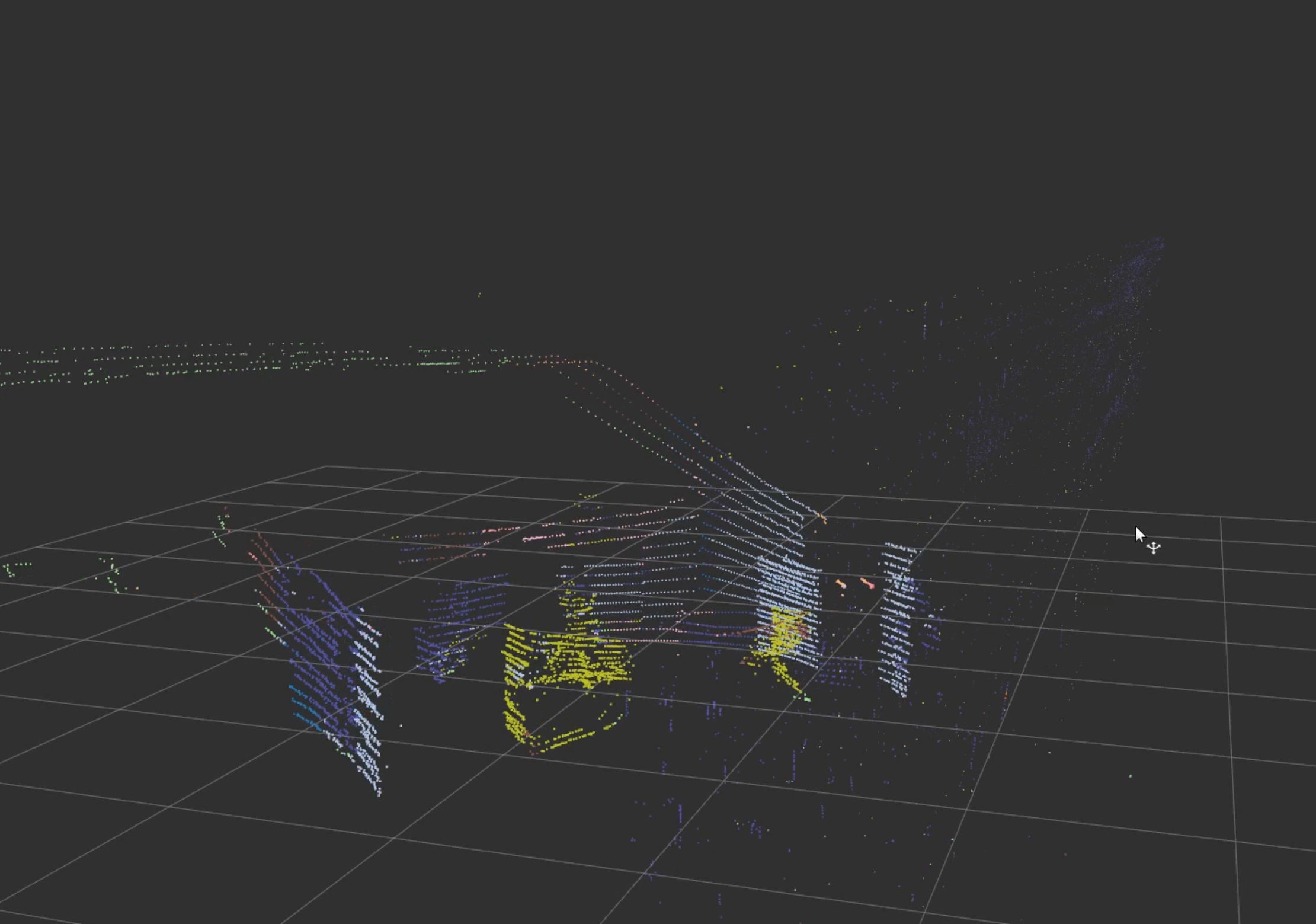
In this picture, the result point cloud(after inference) has noise or something else.
In order to get the cause of the noise, I'd like to check the input and out values.
- I use ScanNet model for pure point cloud inference (velodyne)
- To make input value, I convert point cloud topic to .bin file(KITTI)
- For visualization, I use other method.
- The command line, I run, like this "python ./demo/pc_seg_demo.py ./bin_folder/1.bin configs/pointnet2/pointnet2_ssg_16x2_cosine_200e_scannet_seg-3d-20class.py work_dirs/pointnet2_ssg_16x2_cosine_200e_scannet_seg-3d-20class/latest.pth --device cuda:0"
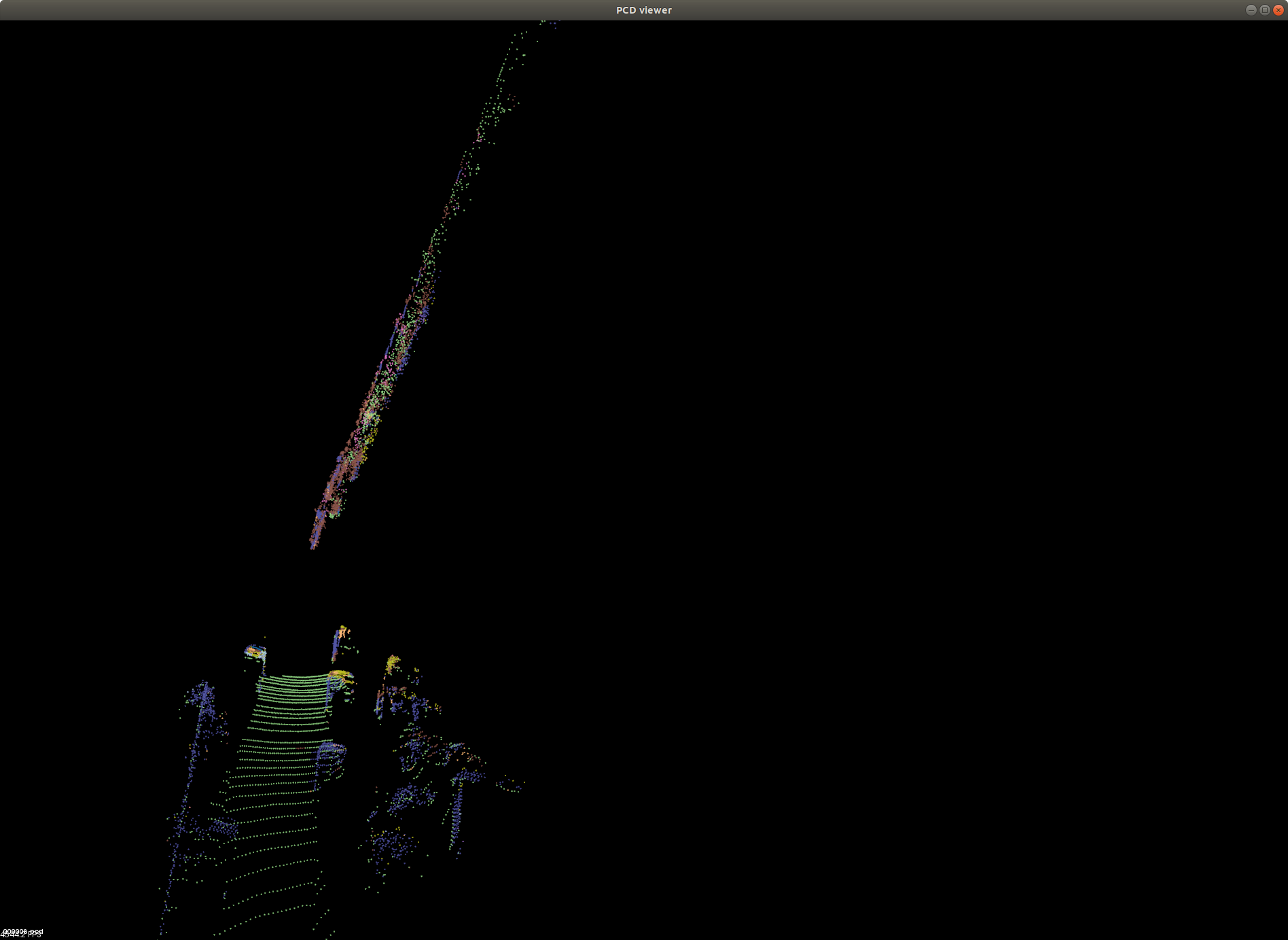
I got the cause of noise.
It was a problem caused by different datasets.
Is there other way to solve this problem except using KITTI model?
- I use KITTI demo .bin file(kitti_000008.bin) for model input.