Azure_Kinect_ROS_Driver
 Azure_Kinect_ROS_Driver copied to clipboard
Azure_Kinect_ROS_Driver copied to clipboard
Camera info on topic not in line with retrieved camera info from SDK
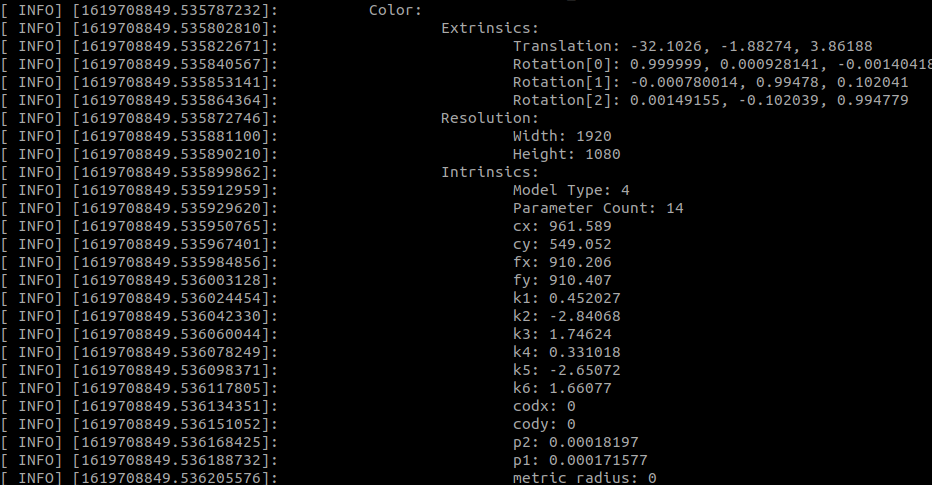
Describe the bug When launching the Azure Kinect ROS node, the camera calibration is printed (see screenshot 2). However, the data published on the camera_info doesn't seem to match with these values. The published camera info also doesn't change when the resolution is changed which is the case for the printed values during launch.
Expected behavior I guess there must be some inconsistency in the data before publishing it to the camera info topic A clear and concise description of what you expected to happen.
Screenshots
Printed values during launch
Camera info on the camera_info topic:

I can not verify this behaviour:
Printout from the driver:
K4A Calibration Blob:
Depth:
Extrinsics:
Translation: 0, 0, 0
Rotation[0]: 1, 0, 0
Rotation[1]: 0, 1, 0
Rotation[2]: 0, 0, 1
Resolution:
Width: 1024
Height: 1024
Intrinsics:
Model Type: 4
Parameter Count: 14
cx: 506.687
cy: 516.342
fx: 504.026
fy: 504.105
k1: 4.15635
k2: 2.75859
k3: 0.139204
k4: 4.48553
k5: 4.13281
k6: 0.747478
codx: 0
cody: 0
p2: 4.25588e-05
p1: -0.000171427
metric_radius: 0
Color:
Extrinsics:
Translation: -32.0527, -2.40845, 3.82875
Rotation[0]: 0.99999, 0.00345786, -0.00299719
Rotation[1]: -0.00321167, 0.996903, 0.078578
Rotation[2]: 0.00325962, -0.0785675, 0.996903
Resolution:
Width: 2048
Height: 1536
Intrinsics:
Model Type: 4
Parameter Count: 14
cx: 1022.92
cy: 776.882
fx: 981.486
fy: 981.434
k1: 0.645745
k2: -2.53493
k3: 1.35801
k4: 0.525175
k5: -2.37791
k6: 1.30022
codx: 0
cody: 0
p2: -0.000384387
p1: 0.000411342
metric_radius: 0
And the camera_info topics:
$ rostopic echo -n 1 /depth/camera_info
header:
seq: 0
stamp:
secs: 1626261409
nsecs: 922112322
frame_id: "depth_camera_link"
height: 1024
width: 1024
distortion_model: "rational_polynomial"
D: [4.156350612640381, 2.7585909366607666, -0.00017142730939667672, 4.2558782297419384e-05, 0.13920409977436066, 4.48553466796875, 4.13280725479126, 0.7474777698516846]
K: [504.0259704589844, 0.0, 506.6871337890625, 0.0, 504.1046447753906, 516.3424682617188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [504.0259704589844, 0.0, 506.6871337890625, 0.0, 0.0, 504.1046447753906, 516.3424682617188, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
$ rostopic echo -n 1 /rgb/camera_info
header:
seq: 0
stamp:
secs: 1626261404
nsecs: 522307224
frame_id: "rgb_camera_link"
height: 1536
width: 2048
distortion_model: "rational_polynomial"
D: [0.6457452774047852, -2.53493070602417, 0.00041134204366244376, -0.0003843868325930089, 1.3580050468444824, 0.5251745581626892, -2.377906560897827, 1.300218939781189]
K: [981.48583984375, 0.0, 1022.91943359375, 0.0, 981.4337158203125, 776.881591796875, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [981.48583984375, 0.0, 1022.91943359375, 0.0, 0.0, 981.4337158203125, 776.881591796875, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
How to align a depth image with a color image
Do you mean how to register images between colour and depth frames? There are the "depth_to_rgb" and "rgb_to_depth" (or similarly named) topics that publish the registered colour and depth images.