vedo
 vedo copied to clipboard
vedo copied to clipboard
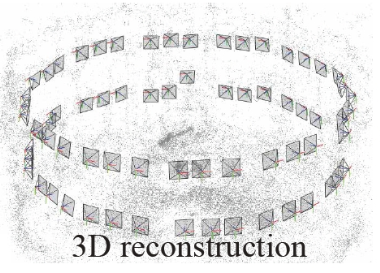
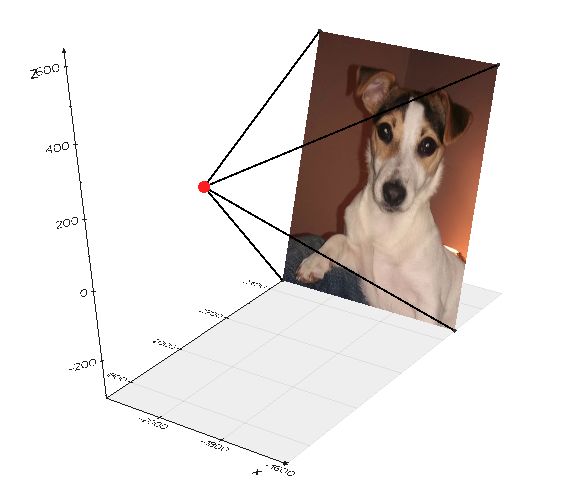
Multi view camera rendering settings
How to set such a scene: https://wuminye.github.io/NHR/datasets.html

This is a relatively common schematic diagram in the current multi-view research field (such as NeRF), and I hope to add a class of such an example.
The primitives can be corresponding images, or cameras like: https://www-users.cse.umn.edu/~hspark/CSci5980/csci5980_3dvision.html
if you have the individual images and orientations in space you can create
pict1 = Picture("pic1.jpg")
pict1.orientation(pic1_vector)
pict1.pos(pic1_position)
...
In addition, can I define a structure that contains an image and a wireframe model of the camera, and then treat this as a whole and place it somewhere and set the orientation?
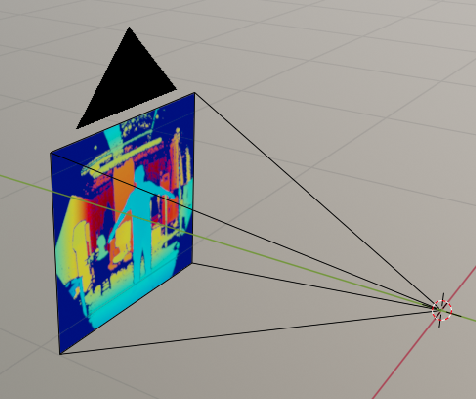
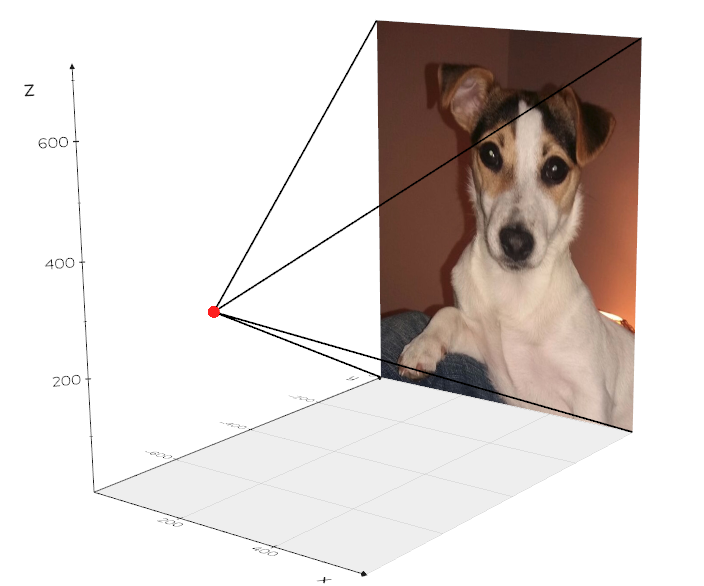
You can use an Assembly object to treat multiple objects as a single one:
from vedo import *
pic = Picture(dataurl + "images/dog.jpg")
dz = 800
x0, x1, y0, y1, _, _ = pic.bounds()
cam = [(x0 + x1) / 2, (y0 + y1) / 2, dz]
lines = Lines(
[
[cam, (x0, y0, 0)],
[cam, (x1, y0, 0)],
[cam, (x0, y1, 0)],
[cam, (x1, y1, 0)],
],
c="black",
lw=2,
)
assem = Assembly([pic, lines, Point(cam)])
assem.orientation([0, -1, 0])
show(assem, axes=1)
How to access the four corners of Picture, I do not find in picture.py and base.py, because the pic may not be axis aligned after some transformations.
Emm, Bounds and Corner are different if I do some transformations like:
pic.origin((1, 2, 2))
pic.orientation((0.2, -0.1, 0.3))
so I wonder if there are any ready-made functions that can be used.
You should transform the assem obj not the pic.
I suggest not to use orientation() as it's ignoring origin() (bug).
and also there is another small bug about obj.transform to being filled for pure rotations...
from vedo import *
settings.use_depth_peeling = True
pic = Picture(dataurl + "images/dog.jpg")
dz = 800
x0, x1, y0, y1, _, _ = pic.bounds()
cam = [(x0 + x1) / 2, (y0 + y1) / 2, dz]
lines = Lines(
[
[cam, (x0, y0, 0)],
[cam, (x1, y0, 0)],
[cam, (x0, y1, 0)],
[cam, (x1, y1, 0)],
],
c="black",
lw=2,
)
corners = Points([(x0, y0), (x1,y0), (x0,y1), (x1,y1)])
assem = Assembly([corners, pic, lines, Point(cam)])
#assem.orientation([1, -1, -2]) # do not use
assem.origin(cam)
assem.rotate_y(90)
assem.rotate_z(-70)
assem.rotate_y(-90)
# T = assem.transform # not filled (bug), workaround:
T = assem.GetMatrix()
corner_pts = corners.clone().apply_transform(T).points()
print(corner_pts)
show(assem, axes=1)
...also it's probably easier if you use around to define a pivoting point instead of origin:
assem.rotate_y(+90, around=cam)
assem.rotate_z(-90, around=cam)
assem.rotate_y(-90, around=cam)
# instead of:
# assem.origin(cam)
# assem.rotate_y(+90)
# assem.rotate_z(-90)
# assem.rotate_y(-90)
to make the cam the pivoting point. I must see if there is a more intuitive/natural way for the API as these rotations are a bit tricky...

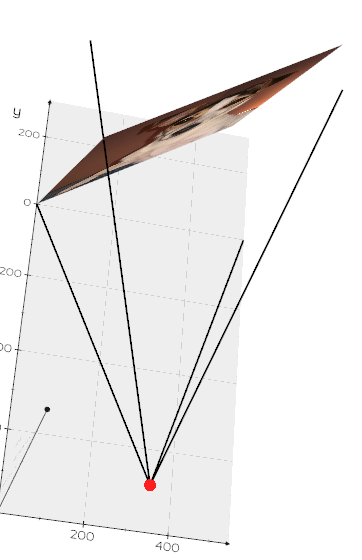
When I scale this down to around 1, the image plane and the line will penetration:
Note the four corners:

from vedo import *
settings.use_depth_peeling = True
pic = Picture(dataurl + "images/dog.jpg")
dz = -1000
if True:
dz = -0.05
dim = pic.dimensions()
pic = pic.scale(2 / np.max(dim) * 0.1)
x0, x1, y0, y1, _, _ = pic.bounds()
cam = [(x0 + x1) / 2, (y0 + y1) / 2, dz]
lines = Lines(
[
[cam, (x0, y0, 0)],
[cam, (x1, y0, 0)],
[cam, (x0, y1, 0)],
[cam, (x1, y1, 0)],
],
c="black",
lw=1.2,
)
assem = Assembly([pic, lines])
assem.origin(cam)
show(assem, axes=0)
I think this is a problem with vtk that has been solved in vtk9.2.2, so I would try:
pip install vtk -U
After the upgrade, I still have this problem. But I can use a larger scale to temporarily circumvent this problem.