madobet
![]()
madobet
郭柱明 * * * ## [](#图数据库背景 "图数据库背景")图数据库背景 在此之前已经简单记录了一下图数据的背景和发展现状 图数据引擎那部分现在还是知之甚少 还没深入去了解 [图数据库背景](https://www.zybuluo.com/gzm1997/note/1207854) * * * ## [](#cayley优点 "cayley 优点")cayley 优点 - go 语言实现 - 运行简单 (三四条命令) - 支持 http 接口以及 REPL...
在卷积神经网络中,我们经常会碰到池化操作,而池化层往往在卷积层后面,通过池化来降低卷积层输出的特征向量,同时改善结果(不易出现过拟合)。 为什么可以通过降低维度呢? 因为图像具有一种 “静态性” 的属性,这也就意味着在一个图像区域有用的特征极有可能在另一个区域同样适用。因此,为了描述大的图像,一个很自然的想法就是对不同位置的特征进行聚合统计,例如,人们可以计算图像一个区域上的某个特定特征的平均值 (或最大值) 来代表这个区域的特征。\[1] ## **1. \*\***一般池化(General Pooling)\*\* 池化作用于图像中不重合的区域(这与卷积操作不同),过程如下图。  我们定义池化窗口的大小为 sizeX,即下图中红色正方形的边长,定义两个相邻池化窗口的水平位移 / 竖直位移为 stride。一般池化由于每一池化窗口都是不重复的,所以 sizeX=stride。 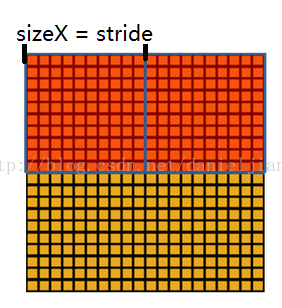 最常见的池化操作为平均池化 mean pooling 和最大池化 max pooling: 平均池化:计算图像区域的平均值作为该区域池化后的值。 最大池化:选图像区域的最大值作为该区域池化后的值。 ## 2....
想要彻底弄明白 L2 范数,必须要有一定的矩阵论知识,L2 范数涉及了很多的矩阵变换。在我们进行数学公式的推到之前,我们先对 L2 范数有一个感性的认识。 **L2 范数是什么?** L2 范数的定义其实是一个数学概念,其定义如下:  这个公式看着相当熟悉吧,用的最多的欧式距离就是一种 L2 范数,表示向量元素的平方和再开方。 **正则化中的 L2 范数** 说到正则化,我们要看一下,**正则化**在深度学习中含义是指什么?正则化其实是一种策略,以增大训练误差为代价来减少测试误差的所有策略我们都可以称作为正则化。换句话说就是正则化是为了防止模型**过拟合**。L2 范数就是最常用的正则化方法之一。 **如何使用 L2 范数来正则化?** 为了方便理解,就以线性规划模型来举个例子,线性规划模型的代价函数也就是平方误差之和,如下:  找到线性模型的解就是找到一个 theta 值能够使代价函数 J 取得最小值,也就是对 J...
I noticed there is a `#include "compat.h"` in the [patch](https://gist.github.com/saitoha/70e0fdf22e3e8f63ce937c7f7da71809) you used, and seems that you comment it in your source code. Could you please tell me what this head...
 本文来自 CSDN 网站,作者 EasonApp。 作者专栏: ## YOLOv1 这是继 RCNN,fast-RCNN 和 faster-RCNN 之后,Ross Girshick 针对 DL 目标检测速度问题提出的另外一种框架。YOLO V1 其增强版本在 GPU 上能跑 45fps,简化版本 155fps。 > 论文下载: > > 代码下载: **1. YOLO...