skimap_ros
 skimap_ros copied to clipboard
skimap_ros copied to clipboard
Implementation on quadrotor
Hey i successfully made skimap to work with orb slam 2 ...but i have some confusions.. i saw some parameters in launch file called ground height and agent height... i cant understand what are those...what i think is a quadrotor doesnt fly at constant height so the agent height cant be constant, anyways while testing i set them to zero. If i am thinking wrong please correct me....can it be used with quadrotors too?
I got a map something like this
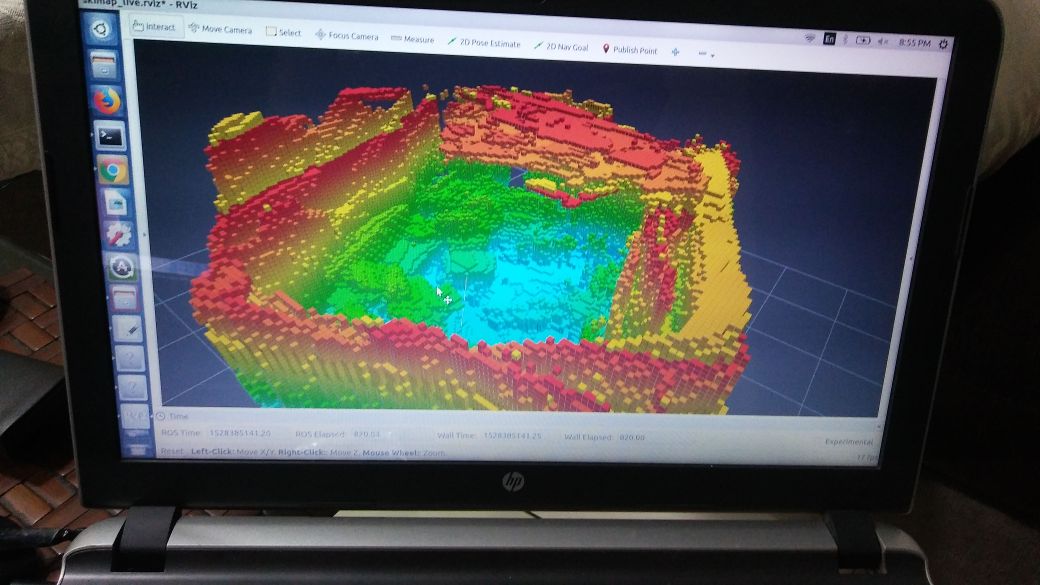
@Razbotics the AgentHeight and GroundLevel are used only when computing 2D Map for a Mobile Robot. For the 3d map, as your scenario, are ineffective. Maybe try to set MinWeight a little bit higher to remove noise
Ok thanks for the reply....but does skimap updates map based on dynamic objects...when experimenting i found that the occupancy was still filled after removing the object from the same area.