depthai
 depthai copied to clipboard
depthai copied to clipboard
[BUG] {OAK-D Pro POE with depthai_demo.py says No DepthAI device found!}
Describe the bug I have followed the steps mentioned in the installation guide. When I try to run the depthai_demo.py it always says No DepthAI device found!, the gui opened but I am not able to see anything about the camera. I am using a PC with OS: Ubuntu 20-04 I have already made the same experiment with Ubuntu 18.04 with identical result. With the same set up I have ran the python code in Windows with any problem. I can ping the camera in the 169.254.1.222 and my IP is 169.254.1.10. Have you hear before about it?
Expected behavior The image should be visible as in the Windows case.
Screenshots
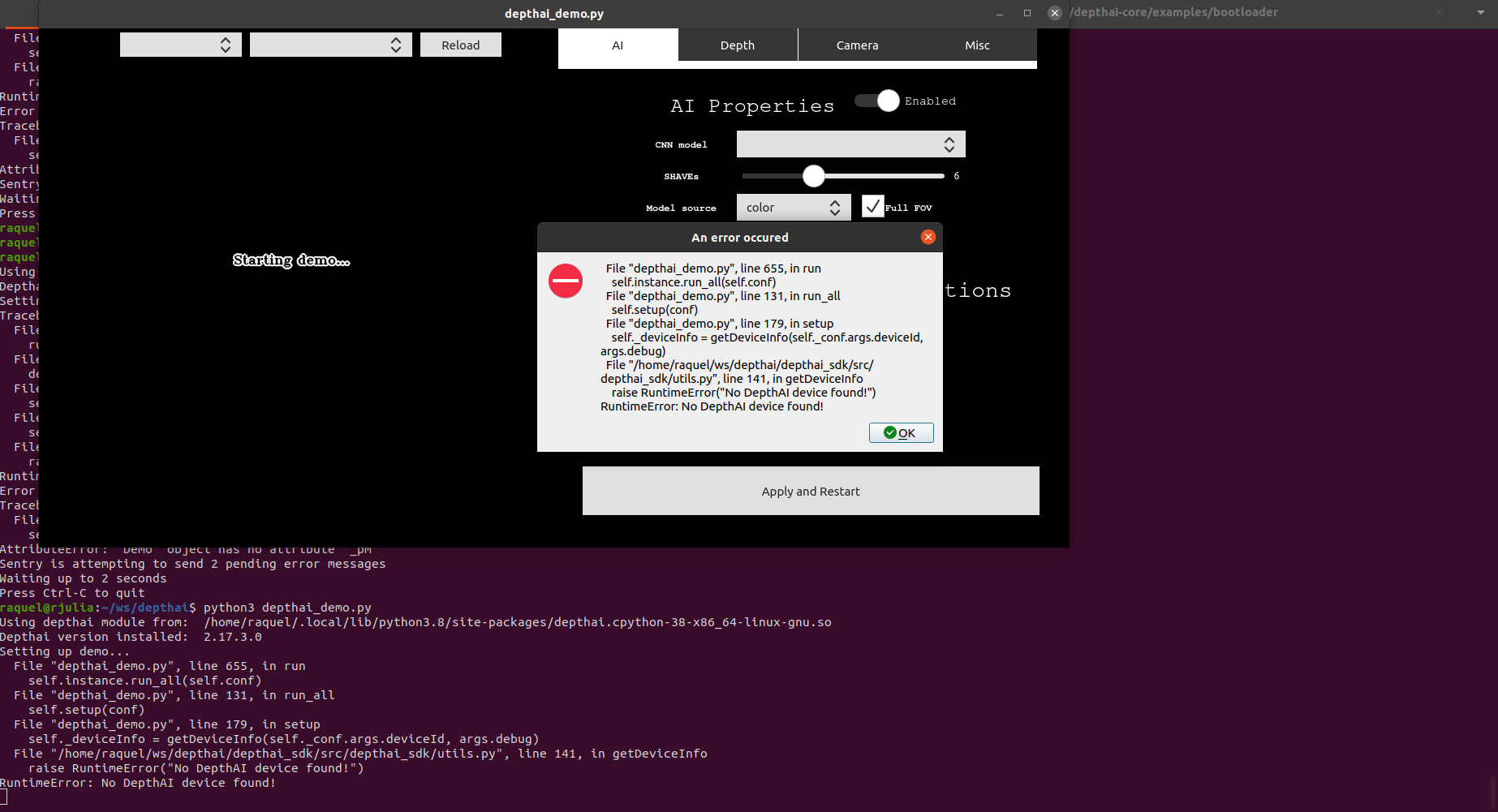
Attach system log { "architecture": "64bit ELF", "machine": "x86_64", "platform": "Linux-5.8.0-43-generic-x86_64-with-glibc2.29", "processor": "x86_64", "python_build": "default Jun 22 2022 20:18:18", "python_compiler": "GCC 9.4.0", "python_implementation": "CPython", "python_version": "3.8.10", "release": "5.8.0-43-generic", "system": "Linux", "version": "#49 ~ 20.04.1-Ubuntu SMP Fri Feb 5 09:57:56 UTC 2021", "win32_ver": "", "packages": [ "actionlib==1.13.2", "angles==1.9.13", "apturl==0.5.2", "argon2-cffi==21.3.0", "argon2-cffi-bindings==21.2.0", "asttokens==2.0.8", "attrs==22.1.0", "backcall==0.2.0", "bcrypt==3.1.7", "beautifulsoup4==4.11.1", "bleach==5.0.1", "blinker==1.4", "blobconverter==1.3.0", "bondpy==1.8.6", "boto3==1.24.63", "botocore==1.27.63", "breezy==3.0.2", "Brlapi==0.7.0", "camera-calibration-parsers==1.12.0", "catkin==0.8.10", "catkin-pkg==0.5.2", "catkin-pkg-modules==0.5.2", "catkin-tools==0.9.0", "certifi==2019.11.28", "cffi==1.15.1", "chardet==3.0.4", "charset-normalizer==2.0.12", "Click==7.0", "colorama==0.4.3", "command-not-found==0.3", "configobj==5.0.6", "cryptography==2.8", "cupshelpers==1.0", "cv-bridge==1.16.0", "cycler==0.11.0", "dbus-python==1.2.16", "debugpy==1.6.3", "decorator==5.1.1", "defer==1.0.6", "defusedxml==0.7.1", "Deprecated==1.2.7", "depthai==2.17.3.0", "-e git+https://github.com/luxonis/depthai.git@41b95a9e225562fcbb4f5815b0767afa2167d79d#egg=depthai_sdk&subdirectory=depthai_sdk", "diagnostic-analysis==1.11.0", "diagnostic-common-diagnostics==1.11.0", "diagnostic-updater==1.11.0", "distro==1.4.0", "distro-info===0.23ubuntu1", "docutils==0.16", "dulwich==0.19.15", "dynamic-reconfigure==1.7.3", "empy==3.3.2", "entrypoints==0.3", "executing==1.0.0", "fastimport==0.9.8", "fastjsonschema==2.16.1", "ffmpy3==0.2.4", "fonttools==4.37.1", "gencpp==0.6.5", "geneus==3.0.0", "genlisp==0.4.18", "genmsg==0.5.16", "gennodejs==2.0.2", "genpy==0.6.15", "gpg===1.13.1-unknown", "httplib2==0.14.0", "idna==2.8", "importlib-metadata==4.12.0", "importlib-resources==5.9.0", "interactive-markers==1.12.0", "ipykernel==6.15.2", "ipython==8.4.0", "ipython-genutils==0.2.0", "ipywidgets==8.0.1", "jedi==0.18.1", "Jinja2==3.1.2", "jmespath==1.0.1", "joint-state-publisher==1.15.1", "joint-state-publisher-gui==1.15.1", "jsonschema==4.15.0", "jupyter-core==4.11.1", "jupyter_client==7.3.5", "jupyterlab-pygments==0.2.2", "jupyterlab-widgets==3.0.2", "keyring==18.0.1", "kiwisolver==1.4.4", "language-selector==0.1", "laser_geometry==1.6.7", "launchpadlib==1.10.13", "lazr.restfulclient==0.14.2", "lazr.uri==1.0.3", "louis==3.12.0", "lxml==4.9.1", "lz4==4.0.2", "macaroonbakery==1.3.1", "MarkupSafe==2.1.1", "matplotlib==3.5.3", "matplotlib-inline==0.1.6", "mcap==0.0.14", "mcap-ros1-support==0.0.8", "message-filters==1.15.14", "mistune==2.0.4", "more-itertools==4.2.0", "nbclient==0.6.7", "nbconvert==7.0.0", "nbformat==5.4.0", "nest-asyncio==1.5.5", "netifaces==0.10.4", "nose==1.3.7", "notebook==6.4.12", "numpy==1.23.2", "oauthlib==3.1.0", "olefile==0.46", "open3d==0.10.0.0", "opencv-contrib-python==4.5.1.48", "opencv-python==4.5.1.48", "osrf-pycommon==2.0.2", "packaging==21.3", "pandocfilters==1.5.0", "paramiko==2.6.0", "parso==0.8.3", "pexpect==4.6.0", "pickleshare==0.7.5", "Pillow==7.0.0", "pip==22.2.2", "pkgutil_resolve_name==1.3.10", "prometheus-client==0.14.1", "prompt-toolkit==3.0.30", "protobuf==3.6.1", "psutil==5.9.1", "ptyprocess==0.7.0", "pure-eval==0.2.2", "pycairo==1.16.2", "pycparser==2.21", "pycryptodomex==3.6.1", "pycups==1.9.73", "pydot==1.4.1", "PyGithub==1.43.7", "Pygments==2.13.0", "PyGObject==3.36.0", "PyJWT==1.7.1", "pymacaroons==0.13.0", "PyNaCl==1.3.0", "PyOpenGL==3.1.0", "pyparsing==3.0.9", "PyQt5==5.15.5", "PyQt5-Qt5==5.15.2", "PyQt5-sip==12.11.0", "pyRFC3339==1.1", "pyrsistent==0.18.1", "PySimpleGUI==4.60.3", "python-apt==2.0.0+ubuntu0.20.4.4", "python-dateutil==2.8.2", "python-debian===0.1.36ubuntu1", "python-gitlab==2.0.1", "python-gnupg==0.4.5", "python-qt-binding==0.4.4", "pytube==12.1.0", "PyTurboJPEG==1.6.4", "pytz==2019.3", "pyusb==1.2.1", "pyxdg==0.26", "PyYAML==6.0", "pyzmq==23.2.1", "qt-dotgraph==0.4.2", "qt-gui==0.4.2", "qt-gui-cpp==0.4.2", "qt-gui-py-common==0.4.2", "reportlab==3.5.34", "requests==2.26.0", "requests-unixsocket==0.2.0", "resource_retriever==1.12.7", "roman==2.0.0", "rosbag==1.15.14", "rosbags==0.9.11", "rosboost-cfg==1.15.8", "rosclean==1.15.8", "roscreate==1.15.8", "rosdep==0.22.1", "rosdep-modules==0.22.1", "rosdistro==0.9.0", "rosdistro-modules==0.9.0", "rosgraph==1.15.14", "rosinstall==0.7.8", "rosinstall-generator==0.1.22", "roslaunch==1.15.14", "roslib==1.15.8", "roslint==0.12.0", "roslz4==1.15.14", "rosmake==1.15.8", "rosmaster==1.15.14", "rosmsg==1.15.14", "rosnode==1.15.14", "rosparam==1.15.14", "rospkg==1.4.0", "rospkg-modules==1.4.0", "rospy==1.15.14", "rosservice==1.15.14", "rostest==1.15.14", "rostopic==1.15.14", "rosunit==1.15.8", "roswtf==1.15.14", "rqt-moveit==0.5.10", "rqt-reconfigure==0.5.5", "rqt-robot-dashboard==0.5.8", "rqt-robot-monitor==0.5.14", "rqt-rviz==0.7.0", "rqt_action==0.4.9", "rqt_bag==0.5.1", "rqt_bag_plugins==0.5.1", "rqt_console==0.4.11", "rqt_dep==0.4.12", "rqt_graph==0.4.14", "rqt_gui==0.5.3", "rqt_gui_py==0.5.3", "rqt_image_view==0.4.16", "rqt_launch==0.4.9", "rqt_logger_level==0.4.11", "rqt_msg==0.4.10", "rqt_nav_view==0.5.7", "rqt_plot==0.4.13", "rqt_pose_view==0.5.11", "rqt_publisher==0.4.10", "rqt_py_common==0.5.3", "rqt_py_console==0.4.10", "rqt_robot_steering==0.5.12", "rqt_runtime_monitor==0.5.9", "rqt_service_caller==0.4.10", "rqt_shell==0.4.11", "rqt_srv==0.4.9", "rqt_tf_tree==0.6.3", "rqt_top==0.4.10", "rqt_topic==0.4.13", "rqt_web==0.4.10", "ruamel.yaml==0.17.21", "ruamel.yaml.clib==0.2.6", "rviz==1.14.19", "s3transfer==0.6.0", "SecretStorage==2.3.1", "Send2Trash==1.8.0", "sensor-msgs==1.13.1", "sentry-sdk==1.5.1", "setuptools==45.2.0", "simplejson==3.16.0", "sip==4.19.21", "six==1.14.0", "smach==2.5.0", "smach-ros==2.5.0", "smclib==1.8.6", "soupsieve==2.3.2.post1", "stack-data==0.5.0", "systemd-python==234", "terminado==0.15.0", "tf==1.13.2", "tf-conversions==1.13.2", "tf2-geometry-msgs==0.7.5", "tf2-kdl==0.7.5", "tf2-py==0.7.5", "tf2-ros==0.7.5", "tinycss2==1.1.1", "topic-tools==1.15.14", "tornado==6.2", "traitlets==5.3.0", "ubuntu-advantage-tools==20.3", "ubuntu-drivers-common==0.0.0", "ufw==0.36", "unattended-upgrades==0.1", "urllib3==1.25.8", "vcstools==0.1.42", "wadllib==1.3.3", "wcwidth==0.2.5", "webencodings==0.5.1", "wheel==0.34.2", "widgetsnbextension==4.0.2", "wrapt==1.11.2", "wstool==0.1.18", "xacro==1.14.13", "xkit==0.0.0", "zipp==3.8.1", "zstandard==0.18.0" ], "usb": [ { "port": 0, "vendor_id": "0x1d6b", "product_id": "0x0003", "speed": "SuperPlus" }, { "port": 3, "vendor_id": "0x046d", "product_id": "0xc52b", "speed": "Full" }, { "port": 14, "vendor_id": "0x8087", "product_id": "0x0aaa", "speed": "Full" }, { "port": 0, "vendor_id": "0x1d6b", "product_id": "0x0002", "speed": "High" }, { "port": 0, "vendor_id": "0x1d6b", "product_id": "0x0003", "speed": "SuperPlus" }, { "port": 0, "vendor_id": "0x1d6b", "product_id": "0x0002", "speed": "High" } ], "uname": [ "Linux rjulia 5.8.0-43-generic #49~20.04.1-Ubuntu SMP Fri Feb 5 09:57:56 UTC 2021 x86_64 x86_64" ] } System info gathered successfully - saved as "log_system_information.json"
Additional context
Hi @rjuliaros ,
I apologize for the delay. Have you checked getting started with POE docs? Another option is to specify the IP using python depthai_demo.py -dev 169.254.1.222.
Thanks, Erik
@Erol444
I have similar issue and I tried python depthai_demo.py -dev 169.254.1.222.
I also success to ping to "169.254.1.222" by setting my laptop static address to "169.254.1.10".
But after running python depthai_demo.py -dev 169.254.1.222. I got following error.
python depthai_demo.py -dev 169.254.1.222
Using depthai module from: /home/yi/.local/lib/python3.10/site-packages/depthai.cpython-310-x86_64-linux-gnu.so
Depthai version installed: 2.19.0.0
Setting up demo...
File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_demo.py", line 655, in run
self.instance.run_all(self.conf)
File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_demo.py", line 131, in run_all
self.setup(conf)
File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_demo.py", line 179, in setup
self._deviceInfo = getDeviceInfo(self._conf.args.deviceId, args.debug)
File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_sdk/src/depthai_sdk/utils.py", line 220, in getDeviceInfo
raise RuntimeError("No DepthAI device found!")
RuntimeError: No DepthAI device found!
What's going wrong?
Hi all,
I managed to make it work by using an old version of depthai, I'm not sure about the origin of the issue. I will check it in a couple of weeks, I will write again If I find something.
Kind regards,
On Wed, Nov 9, 2022 at 6:19 PM Yoshiyasu Izumi @.***> wrote:
@Erol444 https://github.com/Erol444 I have similar issue and I tried python depthai_demo.py -dev 169.254.1.222 . I also success to ping to "169.254.1.222" by setting my laptop static address to "169.254.1.10". But after running python depthai_demo.py -dev 169.254.1.222. I got following error.
python depthai_demo.py -dev 169.254.1.222 Using depthai module from: /home/yi/.local/lib/python3.10/site-packages/depthai.cpython-310-x86_64-linux-gnu.so Depthai version installed: 2.19.0.0 Setting up demo... File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_demo.py", line 655, in run self.instance.run_all(self.conf) File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_demo.py", line 131, in run_all self.setup(conf) File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_demo.py", line 179, in setup self._deviceInfo = getDeviceInfo(self._conf.args.deviceId, args.debug) File "/home/yi/repo/pg/camera_evaluation/depthai/depthai_sdk/src/depthai_sdk/utils.py", line 220, in getDeviceInfo raise RuntimeError("No DepthAI device found!") RuntimeError: No DepthAI device found!
What's going wrong?
— Reply to this email directly, view it on GitHub https://github.com/luxonis/depthai/issues/781#issuecomment-1309085400, or unsubscribe https://github.com/notifications/unsubscribe-auth/ANR4RRLXI7EZS35VATVATP3WHPMI5ANCNFSM6AAAAAAQBRVTUE . You are receiving this because you were mentioned.Message ID: @.***>
-- https://www.robotnik.eu Raquel Juliá R&D DEPARTMENT (+34) 96 147 54 00 @.*** | robotnik.eu https://www.robotnik.eu https://www.facebook.com/Robotnik.Automation/?notif_t=page_admin¬if_id=1506077317259585 https://twitter.com/RobotnikRobots https://www.linkedin.com/company/robotnik-automation-sll/?viewAsMember=true https://www.instagram.com/robotnik.automation/
--
Please note that this message may contain confidential information. If you have received this message by mistake,please inform the sender of the mistake, then delete the message from your system without making, distributing or retaining any copies of it. Although we believe that the message and any attachments are free from viruses and other errors that might affect the computer or IT system where it is received and read, the recipient opens the message at his or her own risk. We assume no responsibility for any loss or damage arising from the receipt or use of this message. If Robotnik Automation, SLL processes personal data relating to physical persons, such processing will meet the requirements of applicable data protection legislation.Please see our Privacy Policy https://robotnik.eu/privacy-policy/ and our Legal Notice https://robotnik.eu/legal-notice/.
@YoshiyasuIzumi @rjuliaros
We've got a fix for this already in the works (fw_poe_startup_bugfix in core) - we are targeting 2.19.1 to release this bugfix.
Thanks for the report!