depthai-ros

depthai-ros copied to clipboard
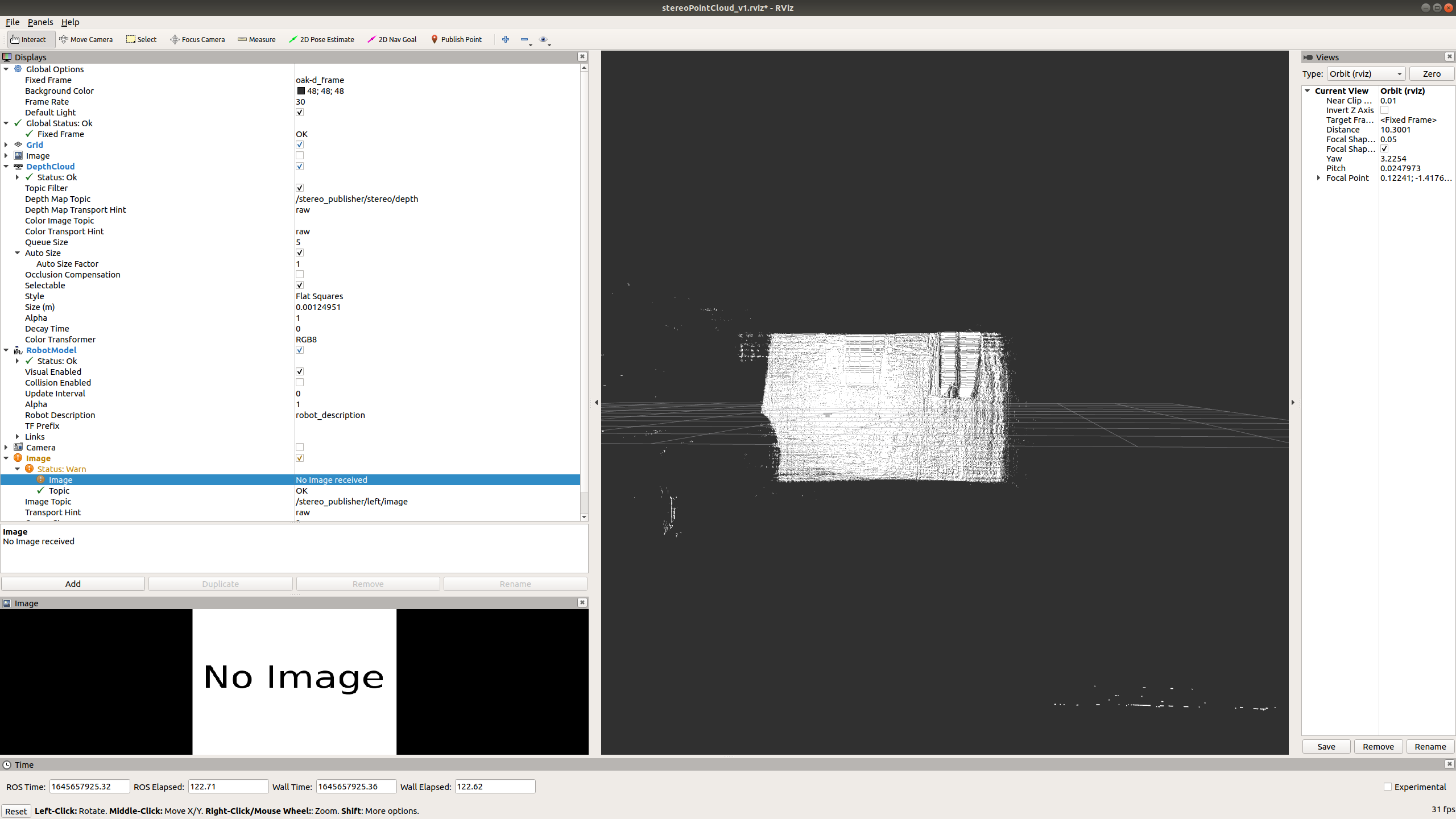
Error visualizing Pointcloud data using stereo_node.launch
@saching13 I am trying to publish the pointcloud data using the oak-d pro. I am facing the following issues.
- Is it possible to publish the pointcloud data using the depthai-ros and OAK-D pro? I am looking for the pointcloud data which has the message type sensor_msgs/PointCloud1 or PointCloud2.
http://docs.ros.org/en/melodic/api/sensor_msgs/html/msg/PointCloud.html
- On adding other topics to RViz, it crashes with a message on the terminal
QObject::connect: Cannot queue arguments of type 'QVector<int>' (Make sure 'QVector<int>' is registered using qRegisterMetaType().)I think it may not be related. I have attached the image.
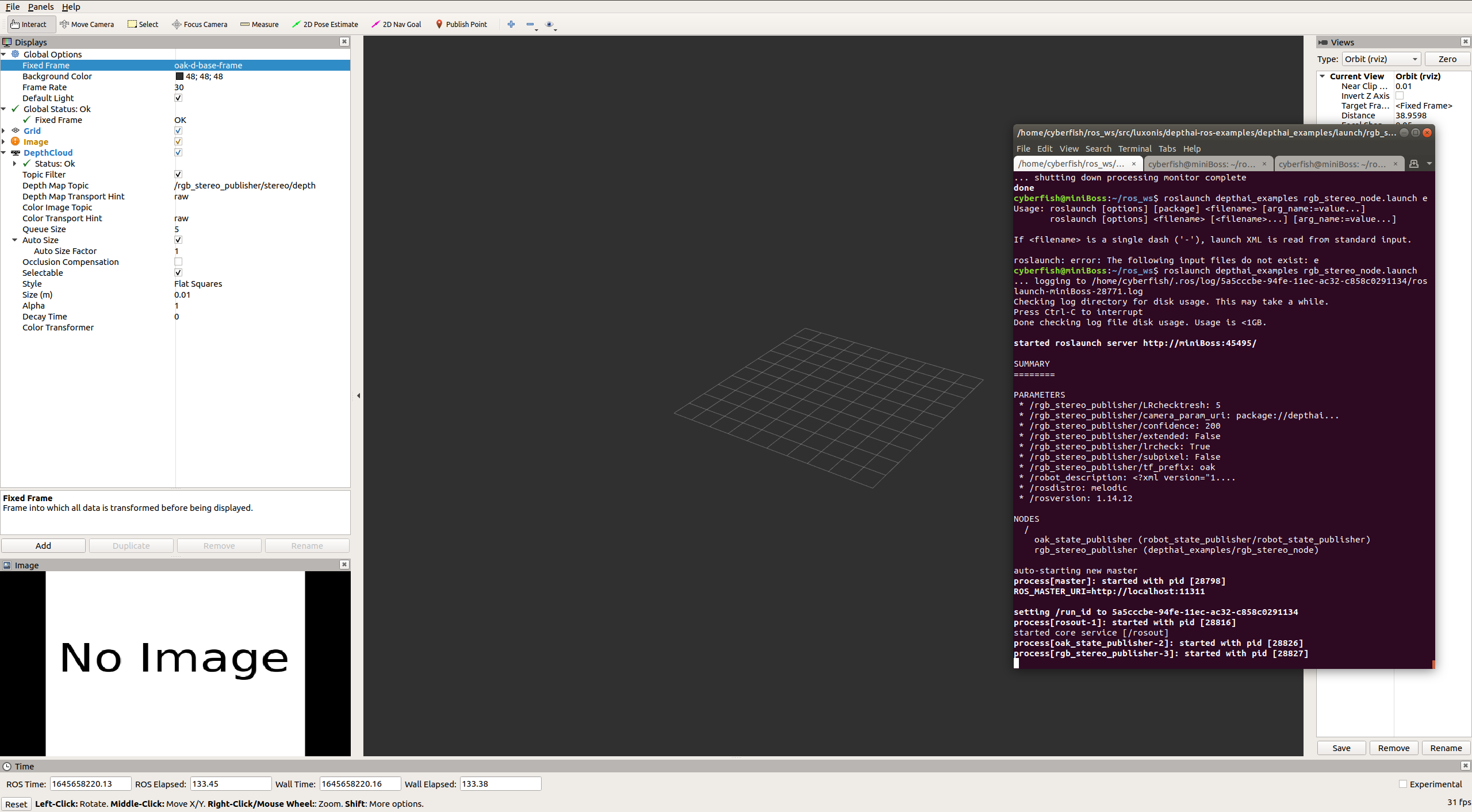
- On trying out the rgb_stereo_node.launch, it does not publish any data on to the topic as none of it can be visualized.
Use the
stereo_nodelet.launchfile for pointcloud.
Hi! What would be the case for obtaining the pointcloud in ROS2?
ros2 launch depthai_examples stereo_inertial_node.launch.py
&
ros2 launch depthai_examples stereo.launch.py
Both works.
Closing due to inactivity, if you think this should remain open, please tag me in a comment here.