RGB Point Cloud
Hi!
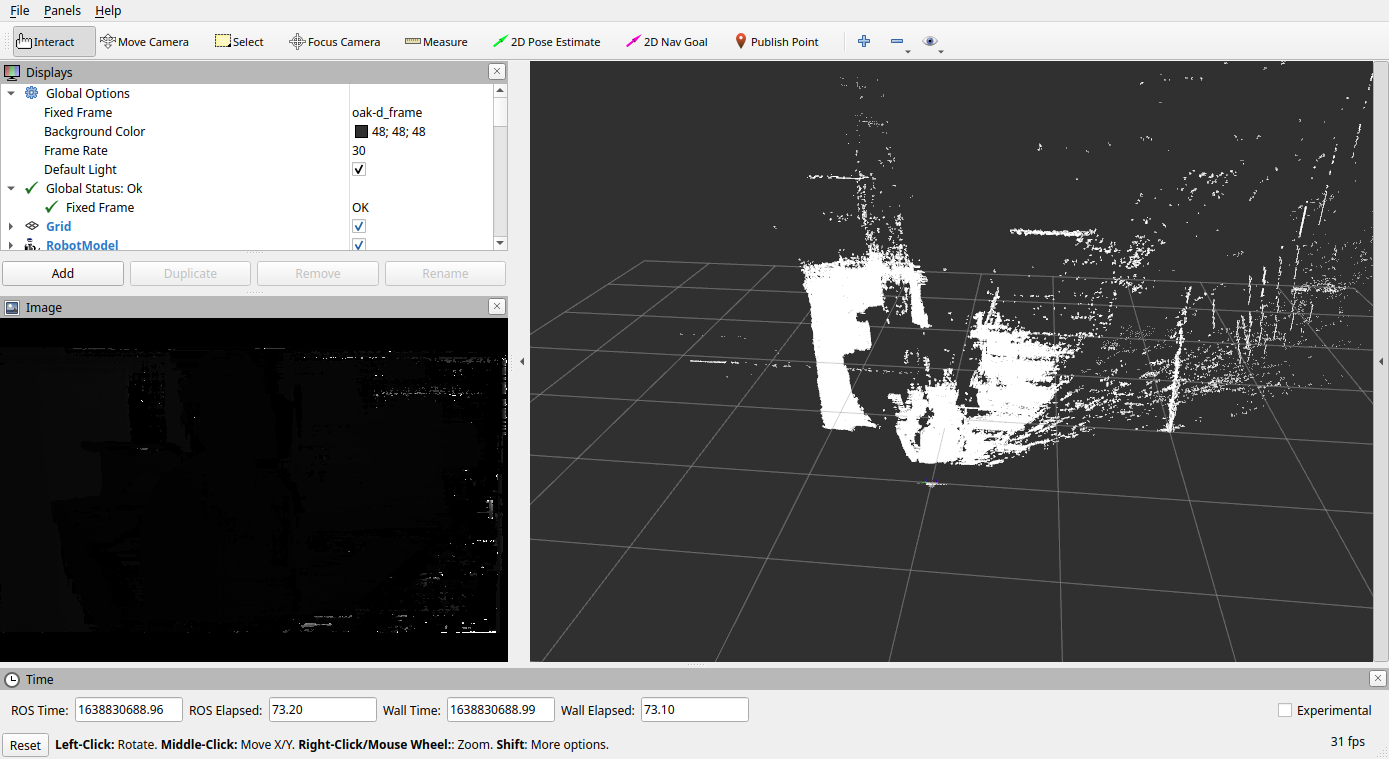
I managed to launch the example 'roslaunch depthai_examples stereo_nodelet.launch' and I can visualize the point cloud in rviz.
How to visualize the point cloud with rgb information? I don't know if this feature is already done, I couldn't find the way to show it.
Thanks!
How to visualize the point cloud with rgb information? I don't know if this feature is already done, I couldn't find the way to show it.
Depth-RGB alignment was recently added in DepthAI (Only for the case when RGB is in the center of the device) for now. An example on this has not been created in ROS yet.
Sorry about the trouble. Likely we have incorrect defaults set. Discussing internally now.
@martinerk0 can you share a screenshot of it please ?
And I modified the confidence and LRThreshold too. And if the newly set parameters still feel like noisy for your usecase use the following parameters to tweak the confidence.
roslaunch depthai_examples stereo_nodelet.launch LRchecktresh:=5 confidence:=200

Closing due to inactivity, if you think this should remain open, please tag me in a comment here.