bcf
 bcf copied to clipboard
bcf copied to clipboard
[NeurIPS 2021 DDM Workshop] A hybrid control strategy for combining deep RL and classical robotic controllers
I find something strange in the results of the code. My results of navigation are as follows. The hyper-parameters are same with yours (Num_Agents =5). 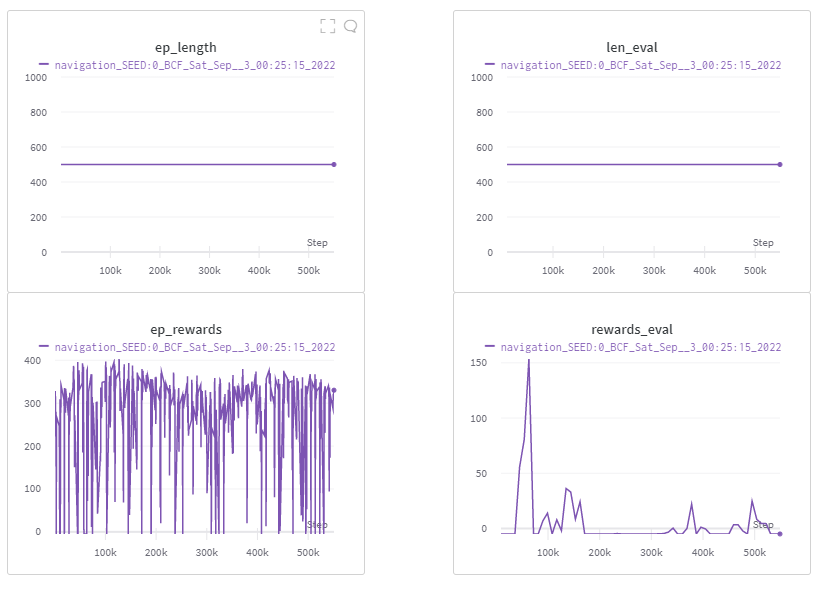 Besides, I have a...
As seen in the code, the variance for APF controller is fixed at 0.6, which does not reflect Eqn. (18) in Bayesian controller fusion at IJRR.
Metadata
Owner
Metadata
[NeurIPS 2021 DDM Workshop] A hybrid control strategy for combining deep RL and classical robotic controllers