limo
 limo copied to clipboard
limo copied to clipboard
Lidar-Monocular Visual Odometry
Hi Johannes, thank you for sharing your project ! I met a 'newbie' problem when I tried to use docker to run the project, I've run the docker and **1....
Hello Your work is very nice. However, I have some question about the build. I do my best to deal with it but I don't any ideal. Could you help...
Hackaton

Hi Johannes, I implemented this algorithm for Carla a few years and would like to help with future development. Couldn't find you email so I created this issue. You can...
Hi, Thank you for sharing your work.about LIMO. Can you also share other KITTI rosbags that are appropriate for your code?I have made a few improvements to your project and...
Hi Johannes, I'm sorry to open a new issue. I wasn't able to reopen the closed one... Thank you very much for your aswer Johannes. Actually, I still don't get...
https://github.com/SwinTransformer/Swin-Transformer-Semantic-Segmentation https://github.com/open-mmlab/mmsegmentation
# steps for preparation * Write a main that reporduces complete process with kitti data - [x] make reader for kitti data - [ ] add limo behaviour to that...
Dear, I faced some error when compile this project in ros melodic. It cause nodelet different from kinetic to melodic. I found out solution from this link: https://github.com/KumarRobotics/msckf_vio/issues/69 Finally, it...
Using the bag file for sequence one, getting the pose result and plotting on matlab I get this: 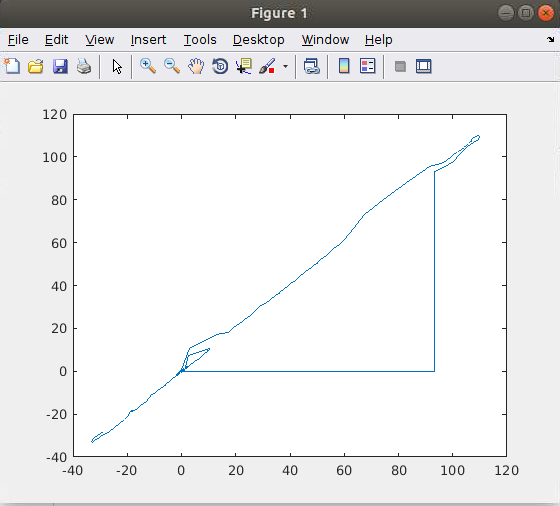 our results the rover traveled around 100+meters but the plot shows...
How can we visualize the odometry data like the youtube video:  I have tried setting path and odometry topics but didn't get the paths to display Is my output...