ORB_SLAM2_grid_navigation

ORB_SLAM2_grid_navigation copied to clipboard
Ros building issue
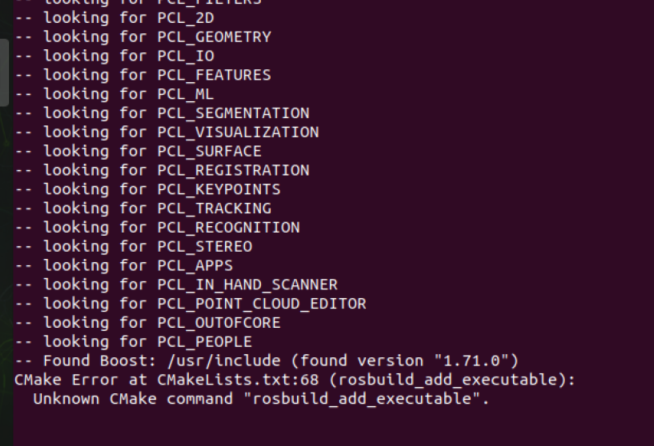
I had this same issue with the original Orbslam2, Cmake.txt isnt updated to ros building on noetic,
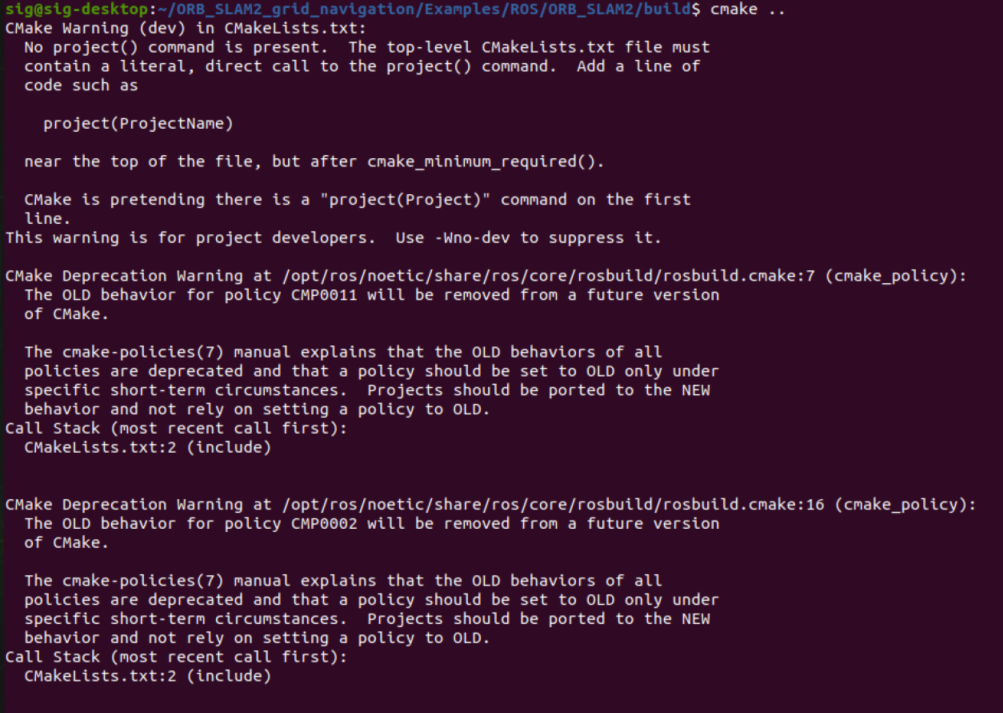
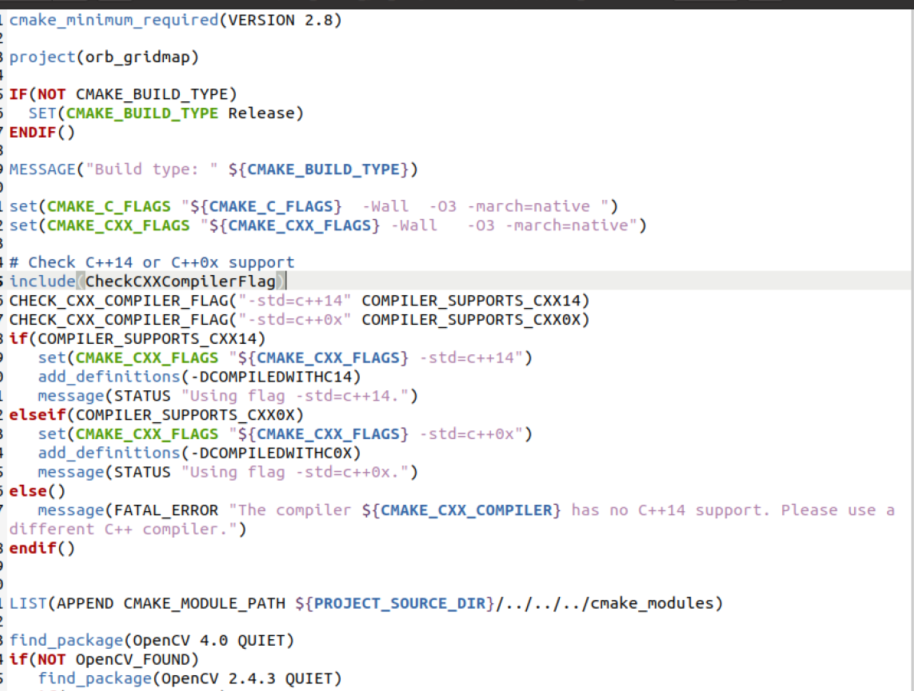
Starting with adding the name of the project and updating the c++ to 14, replacing the open cv for 4.0 (which is the one the realsense d435 uses)
and i have some other errors with adding the executables for the mono examples... anyone has a clue how to build this correctly?