ur5_robotiq_85_picknplace
 ur5_robotiq_85_picknplace copied to clipboard
ur5_robotiq_85_picknplace copied to clipboard
|| Pick n Place application files for ROS Noetic and Moveit with an UR5 and RobotIQ 2DoF Hand ||
UR5_ROBOTIQ85_PICKNPLACE
NOTES:
- There are issues documented about MoveIt! generated packages and gazebo about the controllers.
- See the videos section for the solution.
Brief Review
This project includes all necessary files reproduce a simulation of the UR5 Robotic Manipulator and a RobotIQ85 2 DoF robotic ARM.
At this point we only have the simulations of:
- Viewing the UR5 and gripper separately in rviz
- Viewing the UR5 and gripper as one in rviz
- Viewing the UR5 and gripper separately in gazebo
- Viewing the UR5 and gripper as one in gazebo
- Using the UR5 and gripper separately in rviz with MoveIt! rviz interface
- Using the UR5 and gripper as a standalone device in rviz with MoveIt! and check the execution in gazebo.
- Viewing and using the UR5 and gripper in simulation and visualization using rviz, moveit, gazebo and also viewing the octomap.
I based the structure of this repository using Stanley Automation RobotIQ85, the gazebo grasp plugin from Jenifer Buehler and UR5 from ROS-Industrial.
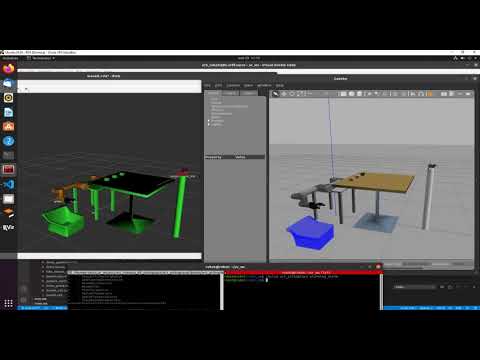
Below an image example of the outcome after the command:
roslaunch ur5_robotiq_85_simulation simulation.launch world_name:='$(find ur5_picknplace)/worlds/ur5_cubes.world'



Using the ur5_robotiq85_picknplace package
- Create a ROS ros workspace and compile an empty package:
cd ~
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make
- Open the
.bashrcwith nano:
nano ~/.bashrc
- Insert this line at the end of the
~/.bashrcfile for sourcing your workspace:
source ~/catkin_ws/devel/setup.bash
- Clone this repo in the
~/catkin_ws/srcfolder by typing:
cd ~/catkin_ws/src
git clone https://github.com/issaiass/ur5_robotiq85_picknplace.git --recursive
git clone https://github.com/StanleyInnovation/robotiq_85_gripper.git
git clone https://github.com/JenniferBuehler/gazebo-pkgs.git
git clone https://github.com/ros-industrial/universal_robot.git
cd ..
- Go to the root folder
~/catkin_wsand make the folder runningcatkin_maketo ensure the application compiles. - Now you can test in several ways the packages
- For viewing in rviz each element or the arm with the gripper, choose anyone of these launch files
roslaunch ur5_picknplace view_arm.launch
roslaunch ur5_picknplace vew_gripper.launch
roslaunch ur5_picknplace vew_gripper_arm.launch
- Visualizing in gazebo, choose anyone of these launch files
roslaunch ur5_picknplace spawn_arm.launch
roslaunch ur5_picknplace spawn_gripper.launch
roslaunch ur5_picknplace spawn_gripper_arm.launch
- For just visualizing in gazebo and rviz simultaneously, choose anyone of these launch files
roslaunch ur5_picknplace arm_gazebo_rviz.launch
roslaunch ur5_picknplace gripper_gazebo_rviz.launch
roslaunch ur5_picknplace gripper_arm_gazebo_rviz.launch
- For controlling using rviz MoveIt! and visualizing the movement in gazebo for the gripper and the arm, choose anyone of these launch files
roslaunch ur5_picknplace gripper_arm_rviz_moveit_gazebo.launch
roslaunch ur5_robotiq_85_simulation simulation.launch world_name:='$(find ur5_picknplace)/worlds/ur5_cubes.world'
roslaunch ur5_picknplace ur5_picknplace.launch # same as above line
- For loading the planning scene please ensure that the simulation is running and then
rosrun ur5_picknplace planning_scene
- For using the picknplace application (but still not working) please ensure that the simulation is running, then load the planning scene (see above node) and then
rosrun ur5_picknplace ur5_picknplace
Results
You could see the results on this youtube video.
UR5 RobotIQ Gripper Moveit 2 0 Planning Scene picknplace still not working
Video Explanation
Explaining UR5 RobotIQ Gripper Moveit 2 0 Planning Scene picknplace still not working

Previous Videos
Part 2/2 - UR5 RobotIQ Gripper MoveIt! 2.0 - Unable to identify any set of controllers that can...
Part 1/2 - UR5 RobotIQ Gripper MoveIt! 2.0 - Unable to identify any set of controllers that can...
Issues
- If you have a compilation error its because the gazebo version and some functions. Refer to this issue to solve it.
- arm plans but when gripper attach object it will not plan again because a collision between the tips and the object
Future Work
- :x: Perception Filtering
- :x: Better grasping method
- :heavy_check_mark: Finish the worlds
- :heavy_check_mark: Solved issue of the robotic arm not moving in gazebo
Contributing
Your contributions are always welcome! Please feel free to fork and modify the content but remember to finally do a pull request.
:iphone: Having Problems?
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
License
