An error occurred when I was running the EuRoc dataset with orbslam3 as the odometer
Hi @matlabbe !
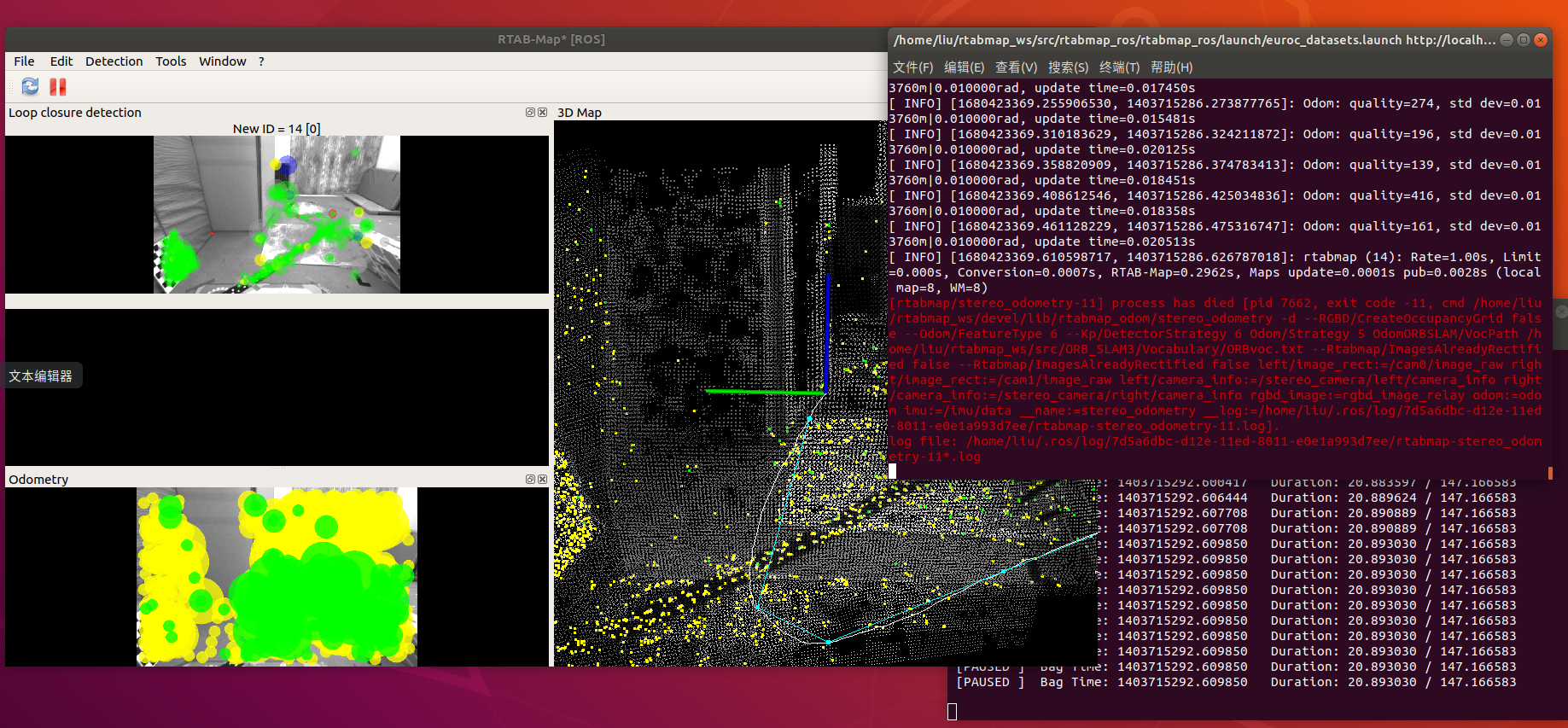
An error occurred when I used orbslam3 as the odometry to run EuRoc data set, I tried V1_01_easy.bag, MH_01_easy.bag, MH_02_easy and the same error occurred. How can I solve this problem?
You may launch stereo_odometry in gdb, and do bt (backtrace) when it crashes. This would give more information where it fails. Note that I am not actively maintaining ORB-SLAM3 support, the last working version I tried is the one referred in this patch: https://gist.github.com/matlabbe/f5cb281304a1305b2824a6ce19792e13 (related post)
Sorry I'm not familiar with GDB and ROS, but this is what rtabmap_ws/devel/lib/stereo_odometry looked like when I opened it with GDB.
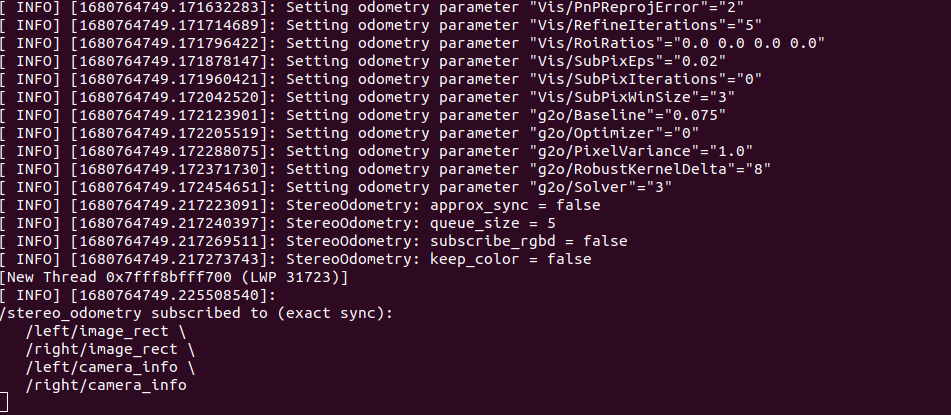 So how do I get this up and running, thank you for your answer
So how do I get this up and running, thank you for your answer
If you are using a launch file to launch the nodes, you can enable gdb with launch-prefix attribute: http://wiki.ros.org/roslaunch/Tutorials/Roslaunch%20Nodes%20in%20Valgrind%20or%20GDB
We cannot see anything in that screenshot, copy/paste the text instead after you do bt (backtrace).